
Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
Community Tip - Your Friends List is a way to easily have access to the community members that you interact with the most! X
- Community
- PTC Education
- PTC Education Forum
- 2015 FIRST World Championship Creo Modeling Challe...
Options
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
2015 FIRST World Championship Creo Modeling Challenge #4 - Robot Gripper Mechanism
Apr 23, 2015
09:39 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Apr 23, 2015
09:39 PM
2015 FIRST World Championship Creo Modeling Challenge #4 - Robot Gripper Mechanism
Creo Parametric CAD Modeling Challenge
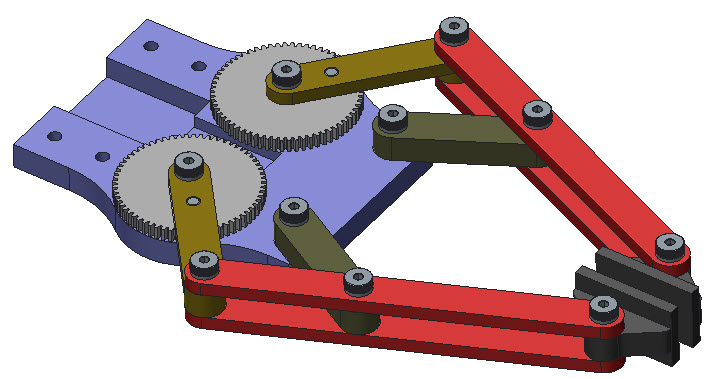
For this fourth Creo Parametric CAD modeling challenge, you will be creating a full assembly of the robot gripper shown below. You need to know basic Creo Parametric assembly constraints, Kinematic constraints and assembly structure to complete the design. It is a complex model to create, but you will need to master Creo Parametric Pin constraints to make it work correctly.
HINTS
- Assemble the gripper plate first and make sure it is grounded
- Add all the hardware at the end
- Create one side first to make sure it works as desired
- After placing the gear, add a second constraint (Slot) using the curve (blanked on layer) to control the range of motion
- Use a Parallel constraint for the gripper_tips to make sure it does not ground (fix) the whole model
- Watch a video of the mechanism motion
Extra Credit
- Create a 1:1 gear connection to synchronize the motion
- Add a motor to one of the gears to simulate the full motion
- Create a rendered video of the full simulation
0 REPLIES 0
