
Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
Please log in to access translation
Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
Community Tip - You can subscribe to a forum, label or individual post and receive email notifications when someone posts a new topic or reply. Learn more! X
- Community
- Creo+ and Creo Parametric
- 3D Part & Assembly Design
- Analysis of mechanisms with mobile skeletons
Translate the entire conversation x
Please log in to access translation
Options
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
Analysis of mechanisms with mobile skeletons
Dec 15, 2020
10:59 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Dec 15, 2020
10:59 AM
Analysis of mechanisms with mobile skeletons
Hello,
I am writing to ask you how to handle the following situation:
We created the suspension assembly of the car using the structure of the moving skeletons (there is a first skeleton, which Creo calls "Design Skel" which contains all the references and then a series of other skeletons, which Creo calls "Body Skel" , which represent all bodies with their kinematic constraints).
(see image 1)
The suspension components are then rigidly mounted on the relative skeleton (e.g. the hub carrier assembly was assembled with the skeleton references C9TR_02_01_LH_HUB_CARRIER_SKEL.PRT).
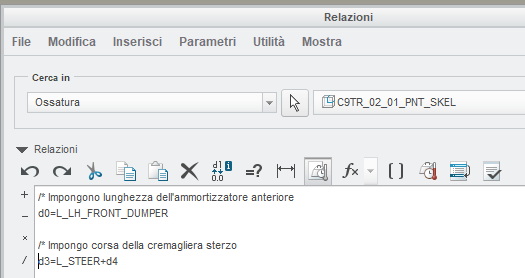
To govern the movement of the assembly we use the stroke of the shock absorber, defined as a parameter (for the front suspension we also have the translation of the steering rack).
(see image 2)
The parameters are used to modify the length of the shock absorber and thus to realize the movement of the assembly.
(see image 3)
The problem with this solution is that we do not know how to "animate" the parameters, or how to ensure that by entering the "Mechanism" section of Creo it is possible to vary the values in order to simulate the movement and be able to make the respective analyzes (eg create volume brushed when shaking).
I noticed that Creo recognizes the connections present in the skeleton structure but I cannot define a "servomotor" to a parameter.
Unfortunately, at least for now, I have not been able to find a way to make the mobile skeleton and the application for the mechanisms speak (I remember it was possible but I haven't used it for a lot).
Thanks bye
Matteo
Labels:
- Labels:
-
3D Animation
-
Assembly Design
0 REPLIES 0





{kind=link}
{kind=link}
{kind=link}