
Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
Please log in to access translation
Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
Community Tip - When posting, your subject should be specific and summarize your question. Here are some additional tips on asking a great question. X
- Community
- Creo+ and Creo Parametric
- 3D Part & Assembly Design
- Re: MDO-Gear Train Dynamic Analysis - Help Please!
Translate the entire conversation x
Please log in to access translation
Options
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
MDO-Gear Train Dynamic Analysis - Help Please!
Jun 02, 2014
07:13 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Jun 02, 2014
07:13 AM
MDO-Gear Train Dynamic Analysis - Help Please!
I am trying to find the torque through a reverted gear train. I am having trouble with the output torque.
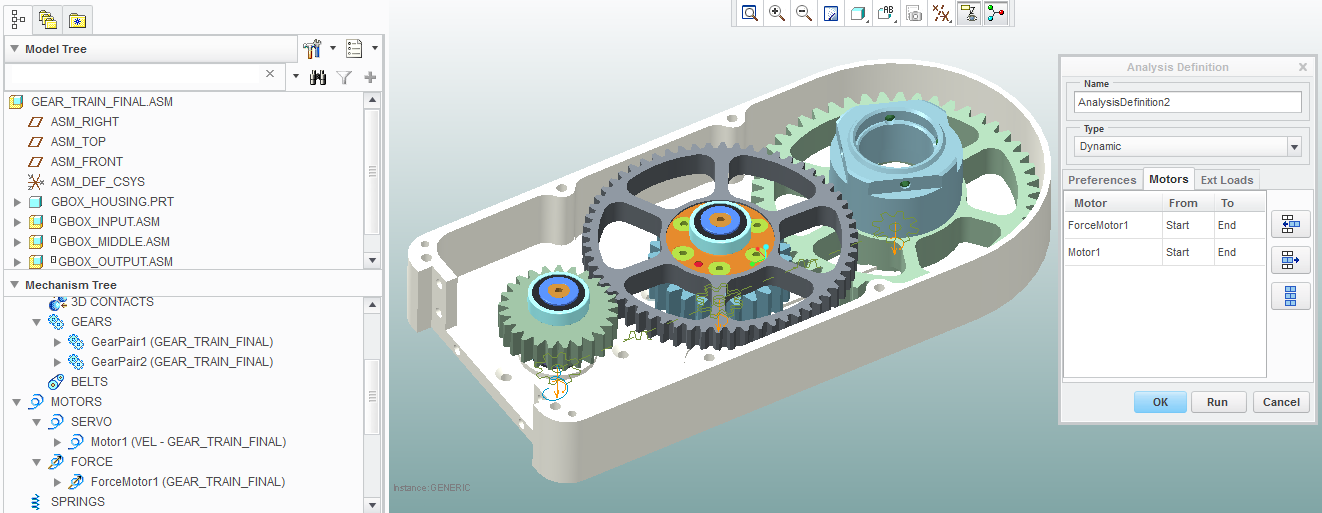
1- I applied servo motor -> input motion axis-> -360 deg/sec
2- applied force motor-> input motion axis-> constant 100 Nmm
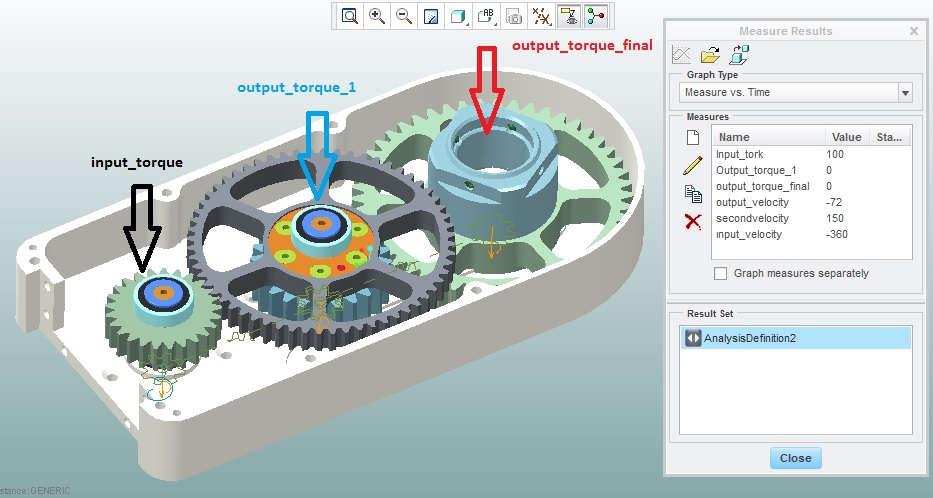
I achieved the velocity results there's not a problem. So, I want to measure output torque on the final gear as pics.
To calculate the input torque, I defined a servo motor together with a force motor in dynamic analysis. İf not, it calculated input torque "0", output torque_1 and final_gear_torque with abnormal results.
1- Do I have to define the servo motor for calculate the input and output torque.
2-It doesn't calculate the output torques anyway. Whatever I did I can't find this problem's source. Could you help me plese?
This thread is inactive and closed by the PTC Community Management Team. If you would like to provide a reply and re-open this thread, please notify the moderator and reference the thread. You may also use "Start a topic" button to ask a new question. Please be sure to include what version of the PTC product you are using so another community member knowledgeable about your version may be able to assist.
Solved! Go to Solution.
ACCEPTED SOLUTION
Accepted Solutions
Jun 02, 2014
08:41 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Jun 02, 2014
08:41 AM
Jonathan is correct - you need to apply a servo motor to the input axis to drive the system at a constant speed, and apply a torque motor on the output axis (or visa-versa). The torque motor will provide the load the system will see throughout all components. Applying a servo and torque motor to the same axis is redundant and the servo motor will "win" by default.
Chris
4 REPLIES 4
Jun 02, 2014
08:27 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Jun 02, 2014
08:27 AM
I'm not an MDO user... but just thinking about it, perhaps you need some resistance to movement on the output in order to generate torque?
In a real situation, if there was nothing connected to the output then the speeds would work out as you show, but it's not possible to generate torque without an opposing load to react it.
Our gearbox test rigs here work in either "speed-torque" or "torque-speed" mode - in other words, you control either input speed and output torque, or input torque and output speed. The principle is the same.
Jun 02, 2014
08:41 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Jun 02, 2014
08:41 AM
Jonathan is correct - you need to apply a servo motor to the input axis to drive the system at a constant speed, and apply a torque motor on the output axis (or visa-versa). The torque motor will provide the load the system will see throughout all components. Applying a servo and torque motor to the same axis is redundant and the servo motor will "win" by default.
Chris
Jun 02, 2014
10:23 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Jun 02, 2014
10:23 AM
yeah, it really works. Thank you friends  ı seek this since last month thank you
ı seek this since last month thank you
Oct 08, 2015
06:11 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Oct 08, 2015
06:11 AM
Thanks a lot for this post ..///
Mani.





{kind=link}
{kind=link}