
Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
Please log in to access translation
Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
Community Tip - You can change your system assigned username to something more personal in your community settings. X
- Community
- Creo+ and Creo Parametric
- 3D Part & Assembly Design
- Re: Mechanism - Double Pin Connection?
Translate the entire conversation x
Please log in to access translation
Options
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
Mechanism - Double Pin Connection?
Mar 07, 2011
04:56 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Mar 07, 2011
04:56 AM
Mechanism - Double Pin Connection?
Hi again!
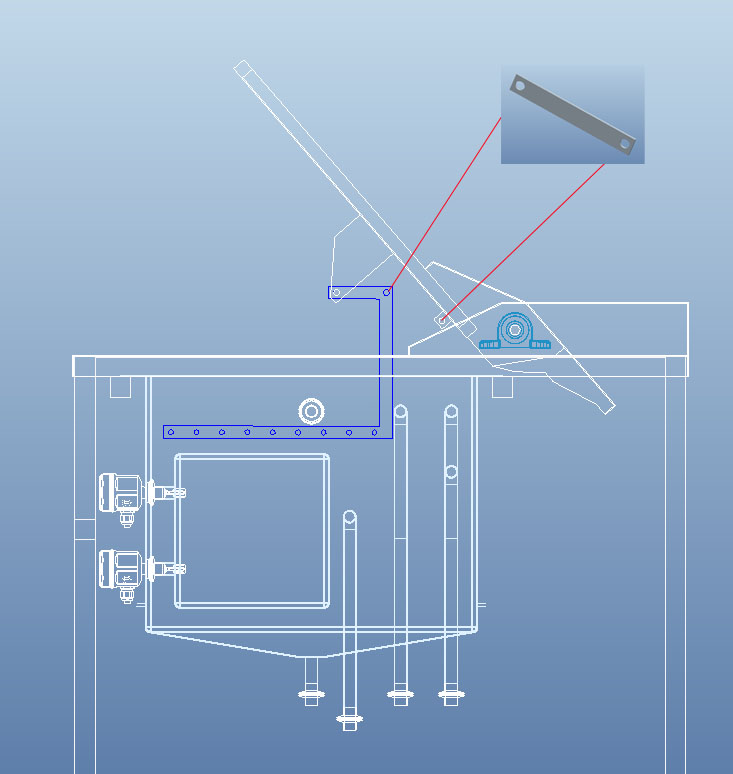
I'm trying to design an automatic lid with a lifting arm attached to it. The picture will probably make it self explanatory.
I want to add a strut to constrain the lifting arm so that it stays horizontal. I'm not sure how to constrain the strut though. I have tried two pin connections but it doesn't move when I drag the lid. It just locks up.
I have also tried a single pin connection and then a standard Axis->Axis contraint on the second pin but I get the same problem. Could someone shine any light on which constraints I need to use to get that working as intended.
Hope I have explained it clear enough, let me know if I haven't and I'll to animate what I want.
Thanks
Lee
This thread is inactive and closed by the PTC Community Management Team. If you would like to provide a reply and re-open this thread, please notify the moderator and reference the thread. You may also use "Start a topic" button to ask a new question. Please be sure to include what version of the PTC product you are using so another community member knowledgeable about your version may be able to assist.
Solved! Go to Solution.
ACCEPTED SOLUTION
Accepted Solutions
Mar 08, 2011
02:20 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Mar 08, 2011
02:20 AM
Hello Lee
I thing that your problem is it not with PIn /Cylinder connections, but with definition kinematic scheme?!?
I created two videos. At first (pin_conection.wmv) you can see how define constraints for your model.
For the second (new kinematic scheme.wmv) shows the definition of the new kinematic scheme. I created only axis for connection - you can add new model which represents a new model through the axis.
Best Regards,
Vladimir Palffy
Vladimir Palffy
6 REPLIES 6
Mar 07, 2011
08:15 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Mar 07, 2011
08:15 AM
Hello.
In this case do you need use Pin connection and Cylinder connection.
Best Regards,
Vladimir Palffy
Vladimir Palffy
Mar 07, 2011
08:17 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Mar 07, 2011
08:17 AM
I did actually try that but it locked the part up again. Does it matter which I specify first? I'll try again and play around and report back.
Mar 07, 2011
08:41 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Mar 07, 2011
08:41 AM
It does matter which side do you specify first.
You need to define in one placement feature (two Sets)
You must identify body that go together.
Best Regards,
Vladimir Palffy
Vladimir Palffy
Mar 07, 2011
09:48 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Mar 07, 2011
09:48 AM
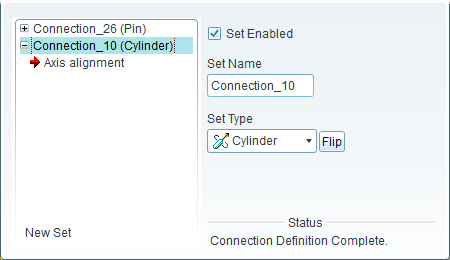
It's still locking up for me. I think I may need to do additional steps. Here are what my constraints look like....
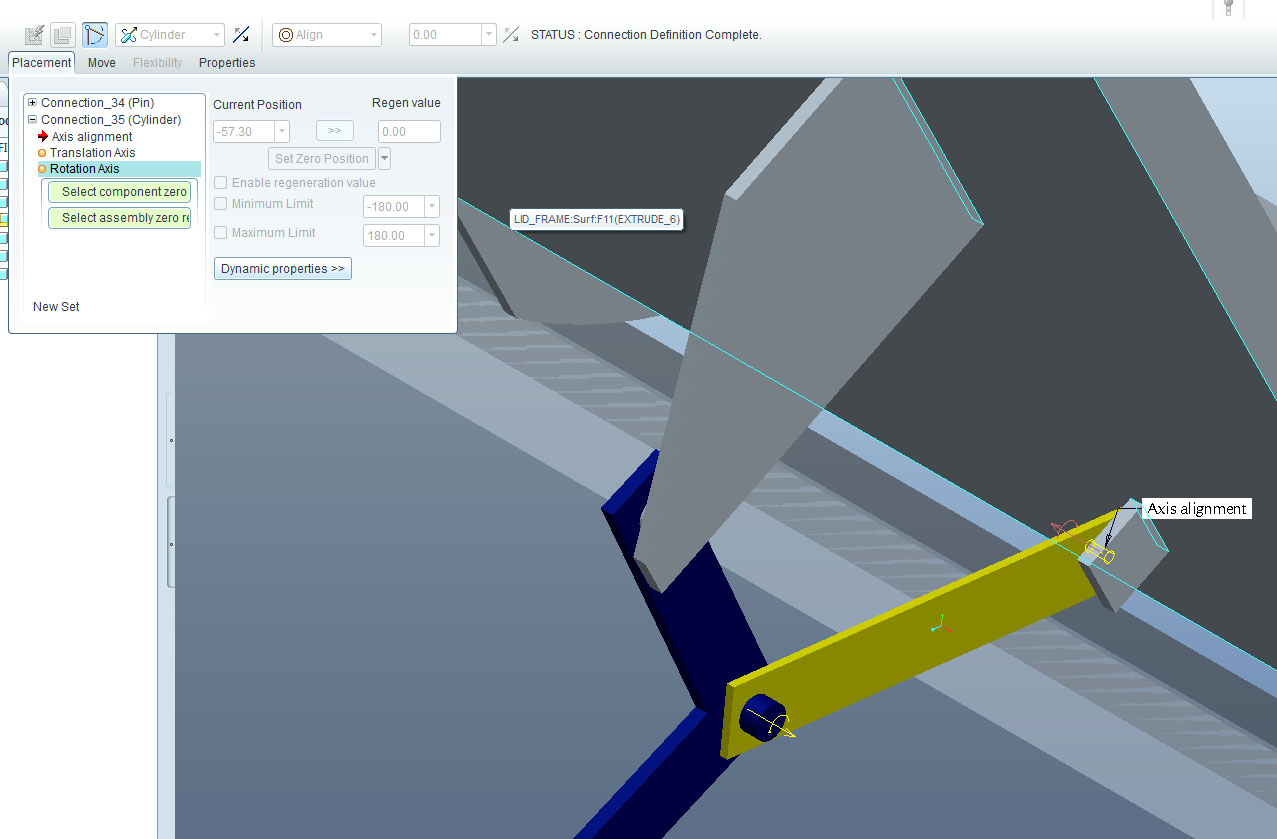
Translation Axis and Rotation Axis are 'orange'. Do I need to set these parameters? What do I need to do here? (if anything)
I can send you the model files if you want to take a look for yourself, would be greatly appreciated.
Thanks
Mar 08, 2011
02:20 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Mar 08, 2011
02:20 AM
Hello Lee
I thing that your problem is it not with PIn /Cylinder connections, but with definition kinematic scheme?!?
I created two videos. At first (pin_conection.wmv) you can see how define constraints for your model.
For the second (new kinematic scheme.wmv) shows the definition of the new kinematic scheme. I created only axis for connection - you can add new model which represents a new model through the axis.
Best Regards,
Vladimir Palffy
Vladimir Palffy
Mar 08, 2011
04:34 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Mar 08, 2011
04:34 AM
Hi Vladimir,
Yes I realised this last night and managed to get the desired result.
Thank you very much for your help!
Lee




