
Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
Please log in to access translation
Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
Community Tip - When posting, your subject should be specific and summarize your question. Here are some additional tips on asking a great question. X
- Community
- Creo+ and Creo Parametric
- 3D Part & Assembly Design
- How to create multiple surface constraints for a s...
Translate the entire conversation x
Please log in to access translation
Options
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
How to create multiple surface constraints for a simulation
Aug 08, 2016
11:33 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Aug 08, 2016
11:33 PM
How to create multiple surface constraints for a simulation
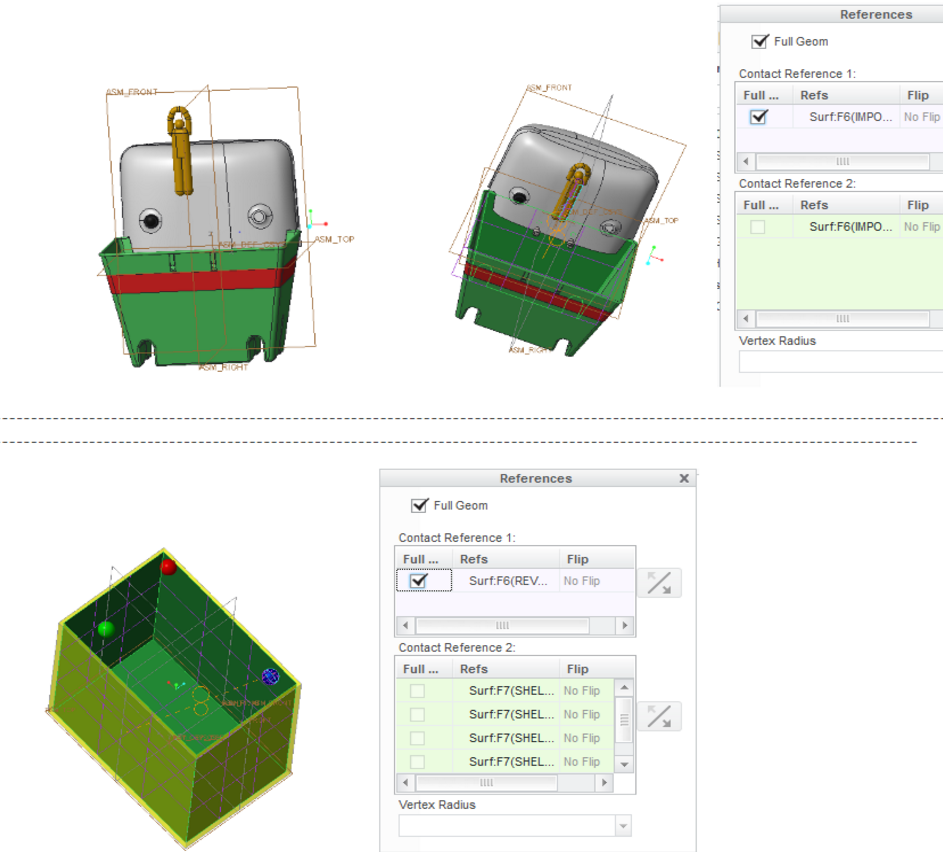
In my mechanism below I want to simulate the bouncing shown in example provided in the exercise eleven of the How to Model Anything. The yellow man consistently goes straight through the green box rather than stopping at the bottom of the bin. I tconcluded that it is due to the fact that I do not have all the surfaces referenced as is done in the 4th picture below. How do i do multiple 3D connection references, as I only have one surface 3D connection reference as it does not seem to be enough information for the software to simulate at this point.
Labels:
- Labels:
-
Surfacing
1 REPLY 1
Sep 10, 2016
10:34 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Sep 10, 2016
10:34 PM
I was able to find the issue,
The constraints that are required to stop the ball from passing through the box are actually called "3D Contact Constraints" which can be seen in exercise 9 of the How to Model Anything. They can be defined in the mechanism tab by clicking the surfaces that you want the object to stop at.




