
Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
Community Tip - Need to share some code when posting a question or reply? Make sure to use the "Insert code sample" menu option. Learn more! X
- Community
- Creo+ and Creo Parametric
- 3D Part & Assembly Design
- Re: Pin/Ball/Cylinderical Co-ord System don't allo...
Translate the entire conversation x
Please log in to access translation
Options
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
Pin/Ball/Cylinderical Co-ord System don't allow rotation?
Oct 28, 2013
11:46 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Oct 28, 2013
11:46 AM
Pin/Ball/Cylinderical Co-ord System don't allow rotation?
Hi ,
Version: Creo 2.0
perhaps this is a common problem in FEA models - I'm having trouble properly properly defining the rotational constraints in a model and I'm getting strange results because of it.
I would like to model a steel plate constrained with a pin joint on either side.
The plate should be loaded centrally with 5000N. (see pictures in Excel table).
What i expect to see is that the plate bends upwards in the middle and is free to rotate on either side until the plate comes into tension and holds the load.
The intention was to make a simple model to see if it behaves as intended and then i would use the same method on a more complicated assembly model.
I've ignored the stress levels at first and only looked at the displacements to see if the model is behaving as intended.
i've tried the following and none seem to give the right model behaviour:
- pin constraints - result doesn't look right - as if plate 'tied down' left/right
- ball constraints - result doesn't look right - as if plate 'tied down' left/right
- Cylindrical co-ord systems defined for each lug left/right to allowing rotation about the Theta axis left/right. Tried a number of variations of fixed/free/prescribed for R and Theta here. The resulting displacement varies depending on how much prescribed rotation is allowed. This is independent of the load applied - i reduced the load to just 100N and the deflections were still very large. I expected the plate tension to limit the deflection as some stage.
The problem i see is that the pin/ball constraints seem to fix the edges and don't allow free rotation aroung the selected cylinderical surface as intended.
I thought the Cylindrical coord. system might work but it seems like i can allow any amount of rotational freedom and the resulting deflection just keeps on increasing with no end in sight.
would be great if someone had some more insights here - it doesn't seem to make sense.
Thanks,
Dermot
This thread is inactive and closed by the PTC Community Management Team. If you would like to provide a reply and re-open this thread, please notify the moderator and reference the thread. You may also use "Start a topic" button to ask a new question. Please be sure to include what version of the PTC product you are using so another community member knowledgeable about your version may be able to assist.
Solved! Go to Solution.
ACCEPTED SOLUTION
Accepted Solutions
Oct 30, 2013
02:13 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Oct 30, 2013
02:13 PM
I went through your model and it looks like you're both constrain methods you previously tried did allow rotation (it's just a very small amount of rotation). I ran three different constraint methods: (1) pin constraint, (2) cylindrical coordinate system with theta free, and (3) a kinematic constraint with Rzz free. I also ran the methods (2) and (3) as a large displacement analysis (note that you can't run a LDA with a pin constraint and that I changed the load from a bearing load to a standard load as bearing loads aren't allowed for LDA); a screen show of displacement results for all 5 runs is shown below.
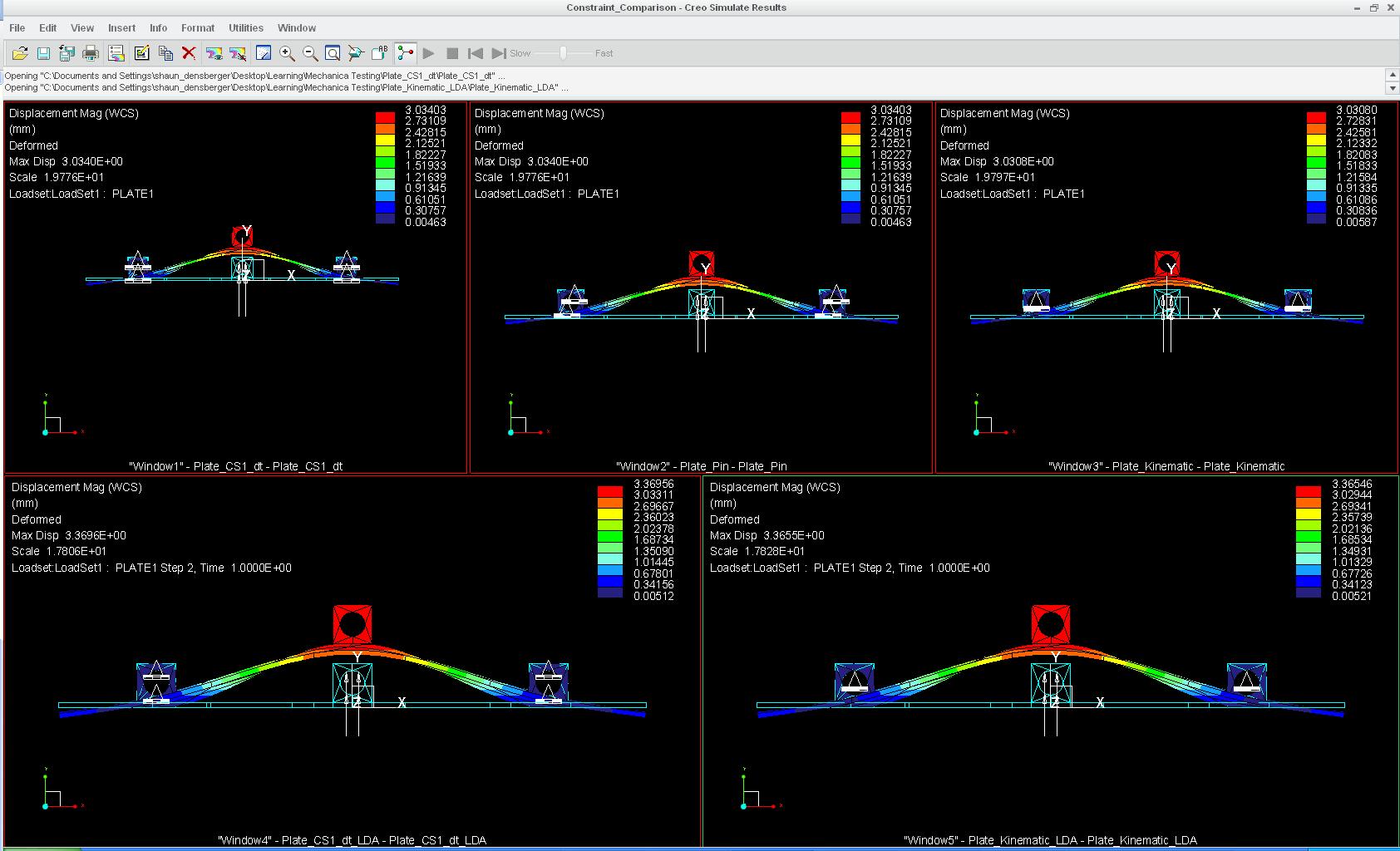
You'll notice that all methods have essentially identical results (the kinematic is a little smaller because the rigid link adds some stiffness to the model), and that the LDA models give above 10% higher displacements. Taking a closer look where the constraints were applied, we can clearly see that rotation is occurring (I zoomed into the top inside hole surface corner of the left lug). You can clearly see that node moves from it's original location for all methods except for the fixed.
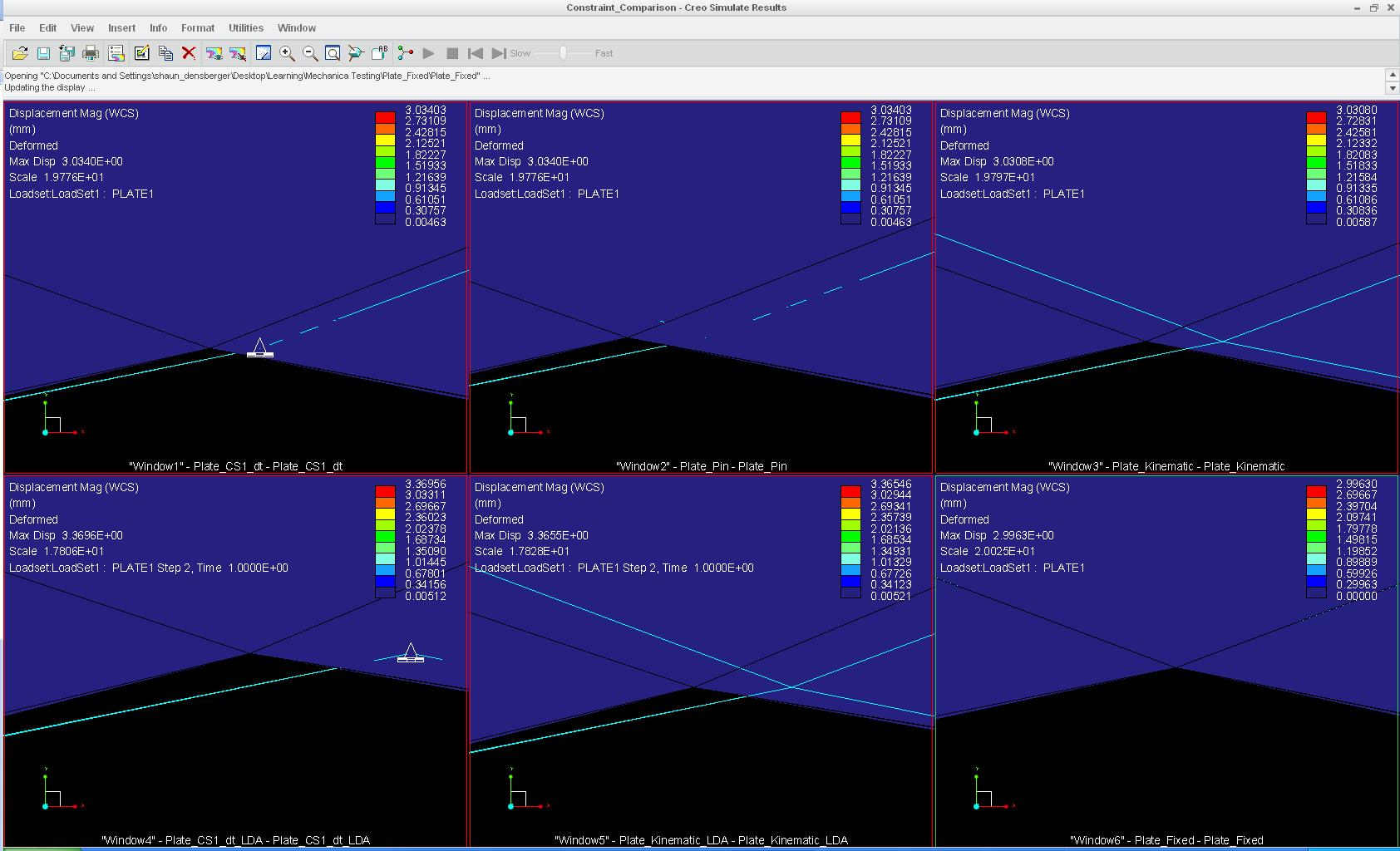
To provide a little more clarification, I run method (2) and a fixed constraint with a moment measure on the constraint surface. For method (2), a moment of -3.157766e-08 Nmm was calculated, but for the fixed constraint a moment of -1.533312e+05 Nmm was calculated.
Now, at the end of the day, I think you and I are on the same page that the deformed shape doesn't "look right", as we'd expect to see larger rotations at the pin joint. I think part of the reason we're not seeing larger rotations is that the lugs effect the local bending stiffness of the plate, resulting in a change in the curvature of the bending.
6 REPLIES 6
Oct 28, 2013
12:31 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Oct 28, 2013
12:31 PM
Hi,
I haven't played with the pin / ball joints (I think they're new in Creo?) but I agree the results look weird.
Re the cylindrical csys, which I have used:
- Setting a value is not allowing a limited amount of movement; it's enforcing a set amount of movement. A theta value of 1 means exactly that: the constrained elements must take on a rotation of 1 [rad | deg] from their original position.
- Have you tried with both R and theta free? It doesn't seem necessary in your example, but these constraints can be more restrictive than it first appears if you think about them very literally. (Logically this shouldn't work, but it might be worth a test.)
The most flexible and controllable approach is probably to create two points at each centre of rotation, one in the middle and one slightly offset. Link one to the surface with a Weighted Link, constrain the other in the DOFs you want (you can use the WCS for this; no need for a local csys unless the axis is at a strange angle), and connect the two points with an advanced spring, with sufficient stiffness not to influence your results unduly (but not too stiff otherwise the analysis may not converge). For your 5000 N, a linear stiffness of 1e7 would keep displacement to a quarter of a micron each, which you shouldn't notice.
Oct 29, 2013
06:01 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Oct 29, 2013
06:01 AM
Thanks for the input:
I've tried setting both R and Theta to 'free' - the error 'The model is insufficiently constrained for the analysis...' occurs.
We don't have an Advanced license so I can't use weighted links - I will try to constrain the model using points and springs to ground.
When I've tried out a few things I will know more.
Oct 28, 2013
01:25 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Oct 28, 2013
01:25 PM
I advise not using pin/ball constraints. I have documented them similar to what you are doing in your sheet and have noticed that their inclusion with any other type of link or constraint can and most likely will cause the memory requirements and solution time to increase dramatically. You will notice this during runtime in the .rpt file during the 'processing mulit-point constraints' step. I do not know why, and after getting comfortable with rigid and weighted links with springs and point constraints I feel they are, as Jonathan pointed out, less controllable and flexible anyway. We prefer to use weighted links or advanced rigid links along with springs to ground at points placed at the feature center. Then a point constraint applied allows rotational DOF. I also advise against the cylindrical csys approach as well due to the fact there are some circumstances were they are not supported for analyses.
Lastly when looking at your model it is rather thin and wide and if your displacements are large, it may quickly turn into a large deformation analysis which can have huge impacts on results.
Hope that helps and good luck,
- J -
Oct 28, 2013
02:20 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Oct 28, 2013
02:20 PM
Dermot,
If you want, you can post the model files and I can take a look at it. Looking over your Excel sheet, it's hard to see exactly how you set it up (as far as trying to find a mistake), but I do agree that it doesn't look like the contraint surfaces are rotation in Model 3.2 (even though Theta is set free). You could place a rotation measure there to see if it is really zero just to be on the safe side. Another option is to use rigid links to connect the inside surface to a datum point at the center, and then apply a constraint at said point with the correct rotational DOF released.
One more thing: it looks like you ran this as a linear analysis. Once the issues with the constraints are sorted out, you should run this as a large-displacement analysis.
Oct 29, 2013
08:31 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Oct 29, 2013
08:31 AM
Here's the model file - i tried to keep it as simple as possible.
Will try the suggestion with the rigid links to a central point in the rotational axis, the point then being constrained to allow rotation.
Oct 30, 2013
02:13 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Oct 30, 2013
02:13 PM
I went through your model and it looks like you're both constrain methods you previously tried did allow rotation (it's just a very small amount of rotation). I ran three different constraint methods: (1) pin constraint, (2) cylindrical coordinate system with theta free, and (3) a kinematic constraint with Rzz free. I also ran the methods (2) and (3) as a large displacement analysis (note that you can't run a LDA with a pin constraint and that I changed the load from a bearing load to a standard load as bearing loads aren't allowed for LDA); a screen show of displacement results for all 5 runs is shown below.
You'll notice that all methods have essentially identical results (the kinematic is a little smaller because the rigid link adds some stiffness to the model), and that the LDA models give above 10% higher displacements. Taking a closer look where the constraints were applied, we can clearly see that rotation is occurring (I zoomed into the top inside hole surface corner of the left lug). You can clearly see that node moves from it's original location for all methods except for the fixed.
To provide a little more clarification, I run method (2) and a fixed constraint with a moment measure on the constraint surface. For method (2), a moment of -3.157766e-08 Nmm was calculated, but for the fixed constraint a moment of -1.533312e+05 Nmm was calculated.
Now, at the end of the day, I think you and I are on the same page that the deformed shape doesn't "look right", as we'd expect to see larger rotations at the pin joint. I think part of the reason we're not seeing larger rotations is that the lugs effect the local bending stiffness of the plate, resulting in a change in the curvature of the bending.



