Solved
Problem with flexible parameters in assembly
Hi,
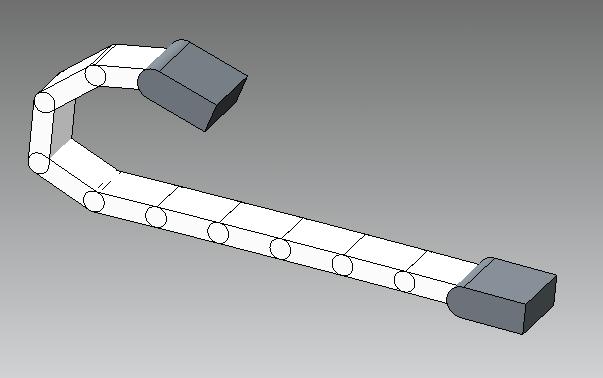
I can't find out what am I doing wrong with my chain assembly model.
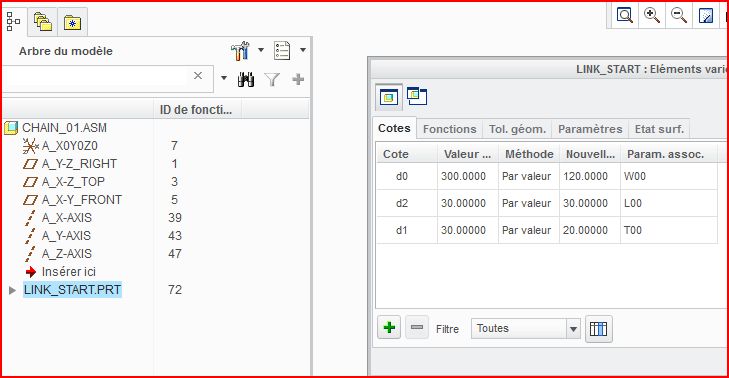
End links and main links are assembled with MDX assembly constraints and flexible dimensions.
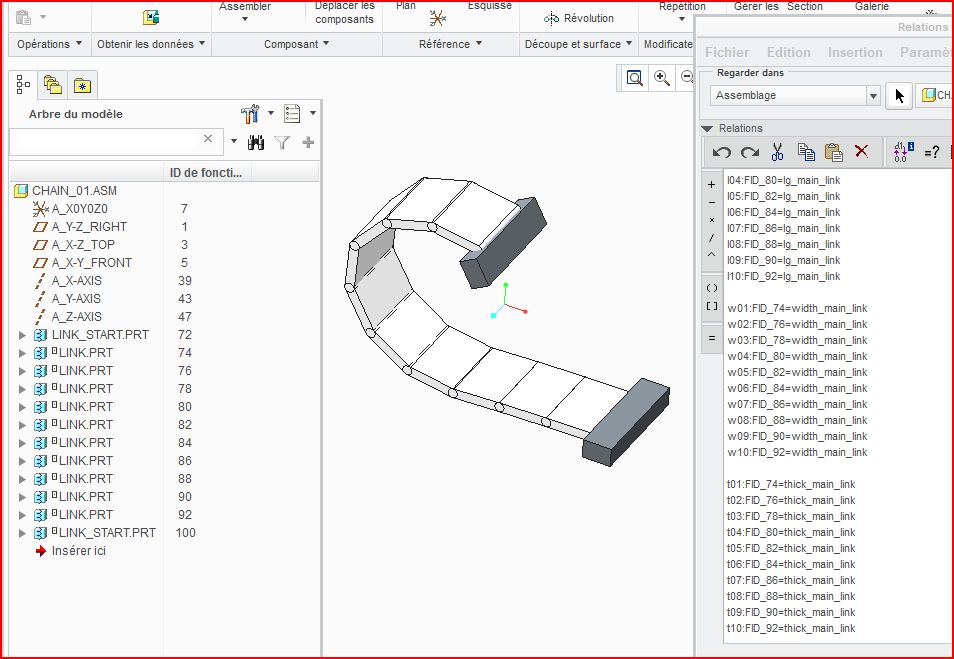
At assembly level, all these dimensions are controlled by relations and parameters.
And these parameters are declared flexible in the chain assembly model.
Up to this point everything works fine : when I change parameters, everything regenerate as expected in the chain assembly model.
When I integrate this chain in another empty assembly, the first link of the chain does not regenerate correctly when I change the flexible parameters. All others will regenerate as expected.
I don't get why.
Any hint ?
This thread is inactive and closed by the PTC Community Management Team. If you would like to provide a reply and re-open this thread, please notify the moderator and reference the thread. You may also use "Start a topic" button to ask a new question. Please be sure to include what version of the PTC product you are using so another community member knowledgeable about your version may be able to assist.