
Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
Please log in to access translation
Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
Community Tip - Want the oppurtunity to discuss enhancements to PTC products? Join a working group! X
- Community
- Creo+ and Creo Parametric
- 3D Part & Assembly Design
- Re: Rack and pinion problem
Translate the entire conversation x
Please log in to access translation
Options
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
Rack and pinion problem
Apr 12, 2023
10:46 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 12, 2023
10:46 AM
Rack and pinion problem
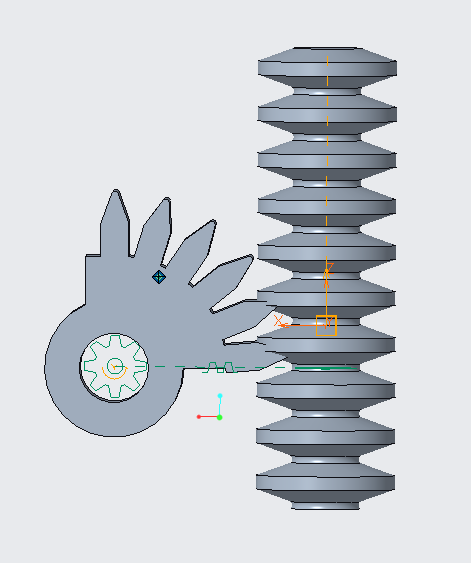
I am currently working on a mechanical flower where I will use a linear motion to create a radial motion from 0 to 90 degrees. The linear motion will be 40mm from a crankshaft and I am now having problems designing the rack and pinion. Is there any easy way to calculate or think about how the degrees and distances should be between the gears? I have done some research but have not found an easy way to calculate it and I would like some input on my current design. Right now I have the problem that the further the pinion moves upwards the more problems I get (see pictures). I would highly appreciate any help with this problem!
Thanks in advance.
Solved! Go to Solution.
ACCEPTED SOLUTION
Accepted Solutions
Apr 13, 2023
10:00 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 13, 2023
10:00 AM
Do not rely on what you see in Creo animations to be representative of reality when doing kinematic or dynamic analysis. You will see interferences etc. where none would exist in reality. Use the motion skeleton and ignore the gear teeth geometry until you have worked out the kinematics. The joint parameters will enable you to determine the gear ratio.
If you need to actually model gear teeth, then you need to go to a machine design reference to get the theory and equations behind the tooth profiles etc. Unless you will be manufacturing these parts yourself, this may not be necessary. I have designed entire gearboxes and built them without modeling a single tooth profile. Using purchased gear components will enable you to skip the modeling of gear teeth.
This entire gearbox for a harmonic balancer was designed in Creo and I did not model any of the teeth. I did the kinematic and dynamic analysis in Creo mechanism design confirmed with some hand calculations and then bought gear pairs etc. off the shelf. The design was validated in a test stand and eventually went through a successful flight test protocol.
The teeth you see are from the manufacturers CAD models (STEP). Note the interference of the teeth in the front view of the CAD even though there is a gear pair constraint on the models.


========================================
Involute Development, LLC
Consulting Engineers
Specialists in Creo Parametric
Involute Development, LLC
Consulting Engineers
Specialists in Creo Parametric
3 REPLIES 3
Apr 12, 2023
10:51 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 12, 2023
10:51 AM
Create a motion skeleton model and use the Creo definition of kinematic joints referencing the skeleton to create a "stick" model to evaluate the kinematics.
Start with link which links to additional resources:
Did You Know? How to Use Motion Skeletons to Quick... - PTC Community
========================================
Involute Development, LLC
Consulting Engineers
Specialists in Creo Parametric
Involute Development, LLC
Consulting Engineers
Specialists in Creo Parametric
Apr 13, 2023
09:37 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 13, 2023
09:37 AM
Looks like you got the gear connection in the software working....
I am guessing from your "sketched" gear that you need to learn and apply gear theory concepts such as module / pitch / gear ratios and also involute curves and pressure angles. Searching for "rack and pinion mathematics" returns a bunch of resources, for example:
https://khkgears.net/new/gear_knowledge/abcs_of_gears-b/basic_gear_terminology_calculation.html

Apr 13, 2023
10:00 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 13, 2023
10:00 AM
Do not rely on what you see in Creo animations to be representative of reality when doing kinematic or dynamic analysis. You will see interferences etc. where none would exist in reality. Use the motion skeleton and ignore the gear teeth geometry until you have worked out the kinematics. The joint parameters will enable you to determine the gear ratio.
If you need to actually model gear teeth, then you need to go to a machine design reference to get the theory and equations behind the tooth profiles etc. Unless you will be manufacturing these parts yourself, this may not be necessary. I have designed entire gearboxes and built them without modeling a single tooth profile. Using purchased gear components will enable you to skip the modeling of gear teeth.
This entire gearbox for a harmonic balancer was designed in Creo and I did not model any of the teeth. I did the kinematic and dynamic analysis in Creo mechanism design confirmed with some hand calculations and then bought gear pairs etc. off the shelf. The design was validated in a test stand and eventually went through a successful flight test protocol.
The teeth you see are from the manufacturers CAD models (STEP). Note the interference of the teeth in the front view of the CAD even though there is a gear pair constraint on the models.
========================================
Involute Development, LLC
Consulting Engineers
Specialists in Creo Parametric
Involute Development, LLC
Consulting Engineers
Specialists in Creo Parametric





{kind=link}
{kind=link}
{kind=link}