
Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
Please log in to access translation
Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
Community Tip - Want the oppurtunity to discuss enhancements to PTC products? Join a working group! X
- Community
- Creo+ and Creo Parametric
- Analysis
- Re: GENEVA Mechanism
Translate the entire conversation x
Please log in to access translation
Options
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
GENEVA Mechanism
Jun 11, 2014
01:25 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Jun 11, 2014
01:25 AM
GENEVA Mechanism
I want to make "GENEVA Mechanism" in Creo 2.0... so plz help me which type of constrain i use for that...????
This thread is inactive and closed by the PTC Community Management Team. If you would like to provide a reply and re-open this thread, please notify the moderator and reference the thread. You may also use "Start a topic" button to ask a new question. Please be sure to include what version of the PTC product you are using so another community member knowledgeable about your version may be able to assist.
Solved! Go to Solution.
Labels:
- Labels:
-
Mechanism Design
- Tags:
- mechanism
ACCEPTED SOLUTION
Accepted Solutions
Jun 12, 2014
01:57 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Jun 12, 2014
01:57 AM
Its done by CAM Mechanism....
In that you must have to define the LIFTOFF...
Value of Liftoff is 0.10
if I take 0.5 than interset are occured. Video Link : 5026
16 REPLIES 16
Jun 11, 2014
03:03 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Jun 11, 2014
03:03 AM
Welcome to this forum,
slot follower mechansim can be appliead definitely by predifing the motion curve and point. I am trying to explore the other methods, please let us know if you can explore new method too. Its a nice mechansim.
Regards,
Jayanta Sarkar
Jun 11, 2014
03:54 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Jun 11, 2014
03:54 AM
I am wondering if you have to mimic this action with a custom servo motor profile.
Jun 12, 2014
01:57 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Jun 12, 2014
01:57 AM
Its done by CAM Mechanism....
In that you must have to define the LIFTOFF...
Value of Liftoff is 0.10
if I take 0.5 than interset are occured. Video Link : 5026
Jun 12, 2014
03:13 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Jun 12, 2014
03:13 AM
Nice solution!
How did you figure out the cam profile?
Jun 12, 2014
02:03 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Jun 12, 2014
02:03 AM
If I used 3D contact
than prob occured as shown in video
in this i done dynamic analysis
Jun 12, 2014
05:43 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Jun 12, 2014
05:43 PM
Here's a different approach. I did what Tom suggested and used a servo for drive and driven wheels. The driven wheel's motion is defined by tabular data, but it's very accurate.
Always wanted to model a spherical geneva drive. Fun stuff.
Jun 12, 2014
06:03 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Jun 12, 2014
06:03 PM
Beautiful, Andrew!
Jun 12, 2014
06:28 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Jun 12, 2014
06:28 PM
Wow, I second that, really nice piece of work Andrew! Might look interesting with another semi-sphere on top of that.
Jun 12, 2014
06:58 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Jun 12, 2014
06:58 PM
Why not double up the holding power too!
I wonder if anyone has ever designed a hypoid-style geneva machanism before. You know, nonintersecting, nonparallel shafts.
Jun 13, 2014
01:41 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Jun 13, 2014
01:41 PM
That's way cool!!!
Jun 13, 2014
05:20 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Jun 13, 2014
05:20 AM
Can give me to dimension of sperical gevena drive...
or any internet link for dimension...???
Jun 13, 2014
01:06 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Jun 13, 2014
01:06 PM
Any size you want. A little thought will tell you want has to be done to make the geometry.
Essentially, it is a conical boss (optional) and a pin at 45 degrees from the boss. So the slot has to be 45 degrees vertically as well.
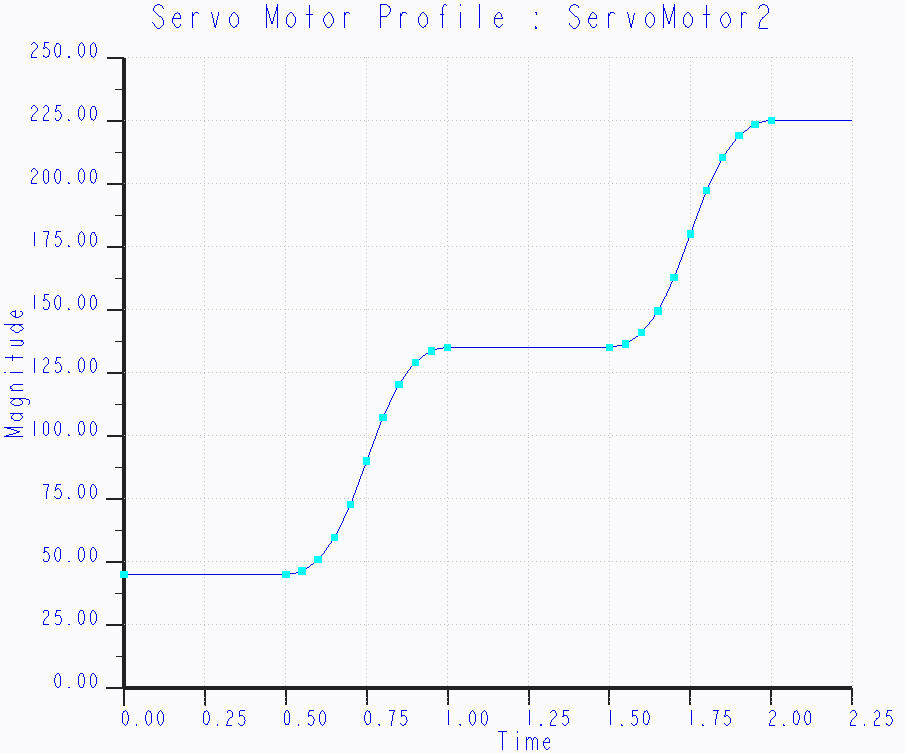
Andrew, can you post the graph for the servo definition you used?
Jun 13, 2014
01:45 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Jun 13, 2014
01:45 PM
Models are attached. The data points for the 1st and second driven wheels are attached also.
Here's a segment of the first driven wheel's servo motor profile. The drive wheel just has a constant velocity of 360 deg./sec.
I half derived the equation of motion for the driven wheel, but the third dimension really complicated it. I ended up just indexing the drive wheel and measured the angles directly.
Jun 13, 2014
02:13 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Jun 13, 2014
02:13 PM
Thanks Andrew. I was thinking it was a straight forward 90 degree cosine with a "rest period".
That one can be programmed fairly easily in the user defined table as well. But only if the input shaft is constant!
I suspect a cam link would be the right way to do this so it could be linked to the input. I haven't done cams yet. This may prove interesting. This would allow for varying input curves.
Jun 13, 2014
10:46 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Jun 13, 2014
10:46 PM
Okay, one could hope. Not exactly a pure cosine curve.
Jun 20, 2014
07:11 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Jun 20, 2014
07:11 PM
Hi Deapk,
It seems like you might have this resolved. If one of the user posts was correct, please mark the post as "Correct Answer."
Announcements




Top Tags
