
Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
Please log in to access translation
Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
Community Tip - Need to share some code when posting a question or reply? Make sure to use the "Insert code sample" menu option. Learn more! X
Translate the entire conversation x
Please log in to access translation
Options
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
2 blocks & 3 mass
May 05, 2017
11:52 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 05, 2017
11:52 PM
2 blocks & 3 mass
Labels:
- Labels:
-
Other
ACCEPTED SOLUTION
Accepted Solutions
May 10, 2017
02:33 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 10, 2017
02:33 AM
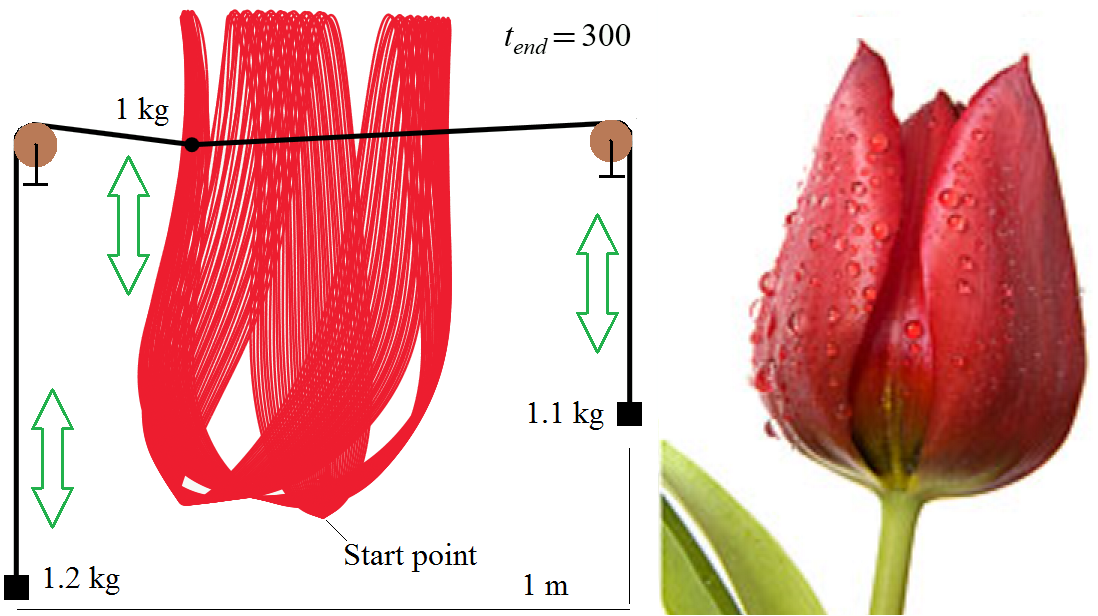
F.M. написал(а):
Beautiful, .... but the woman ... the one of the photo, is even more ...
Woman and Flowers!
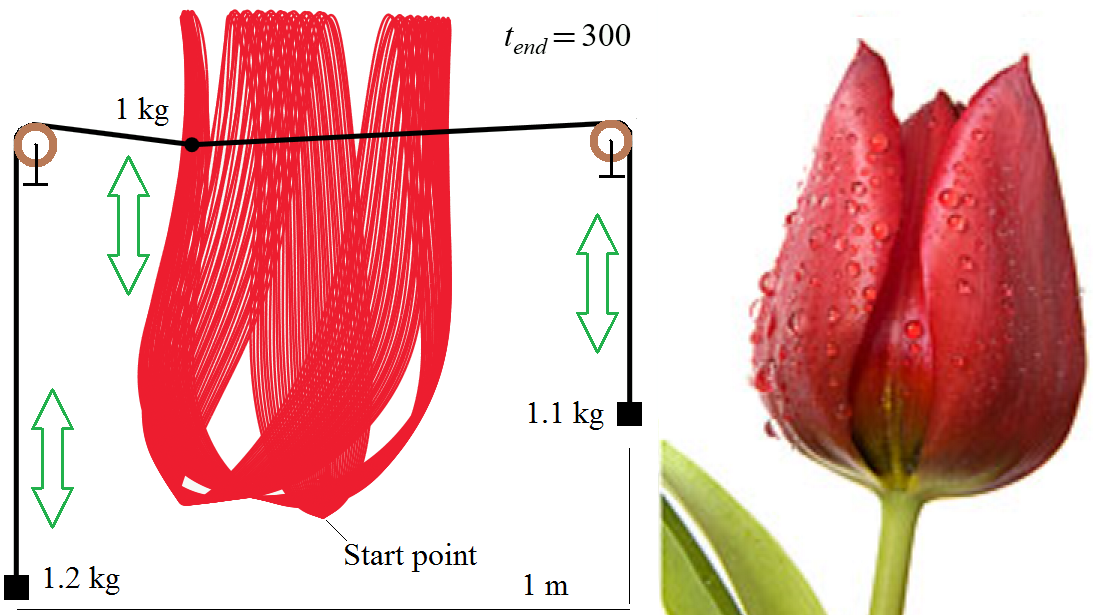
You can change L, masses, start point and get new woman, flowers etc!
108 REPLIES 108
May 06, 2017
05:41 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 06, 2017
05:41 AM
Wouldn't it be better, to study the geometrical relationships before starting calculation?
Volker
May 06, 2017
10:53 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 06, 2017
10:53 AM
Hi Valery,
Can we describe the problem the following way?
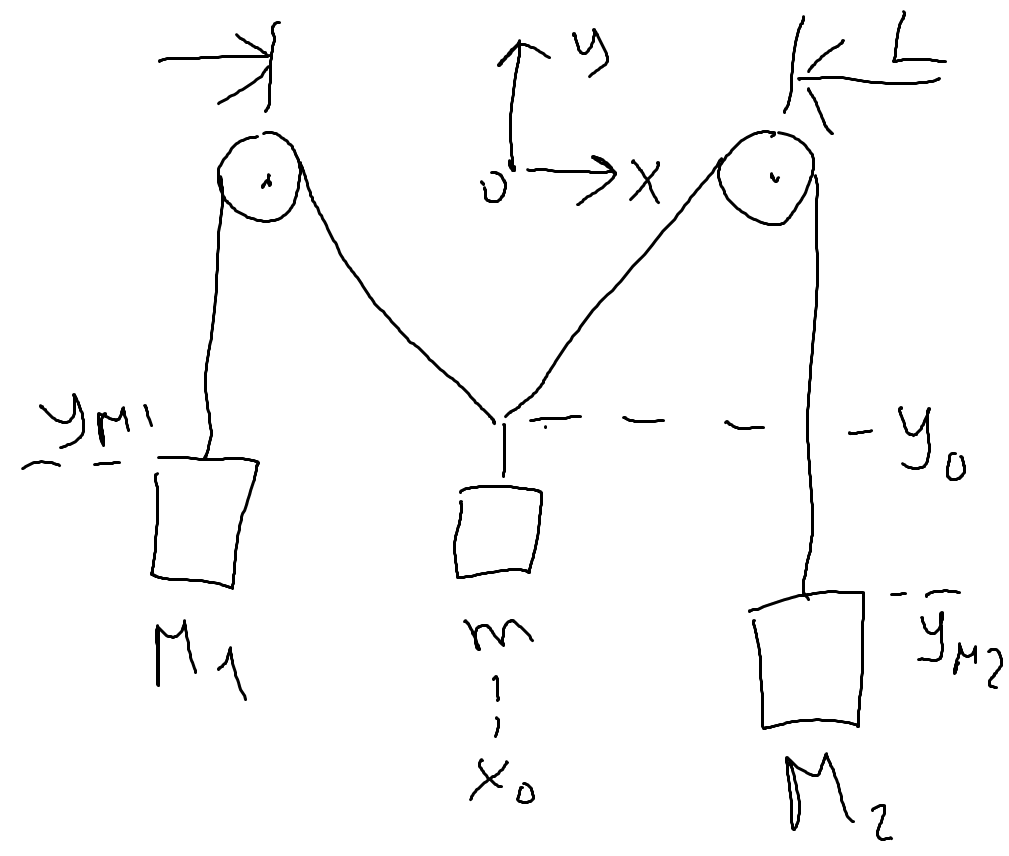
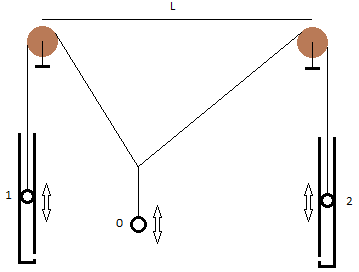
The material system consists of five bodies: the masses M0, M1, M2 and the fixed disks' masses μ1 and μ2, of equal rays r. The wire is inextensible and, by chance, it does not creeping.
Determine the system motion and the tension in the wire.
Can we choose the location of the reference system's origin, at our discretion? For example so:
or is it fixed at L/2?
Thank you
F. M.
May 06, 2017
11:22 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 06, 2017
11:22 AM
Hi F.M.
I guess it's fixed at L/2 and y0.
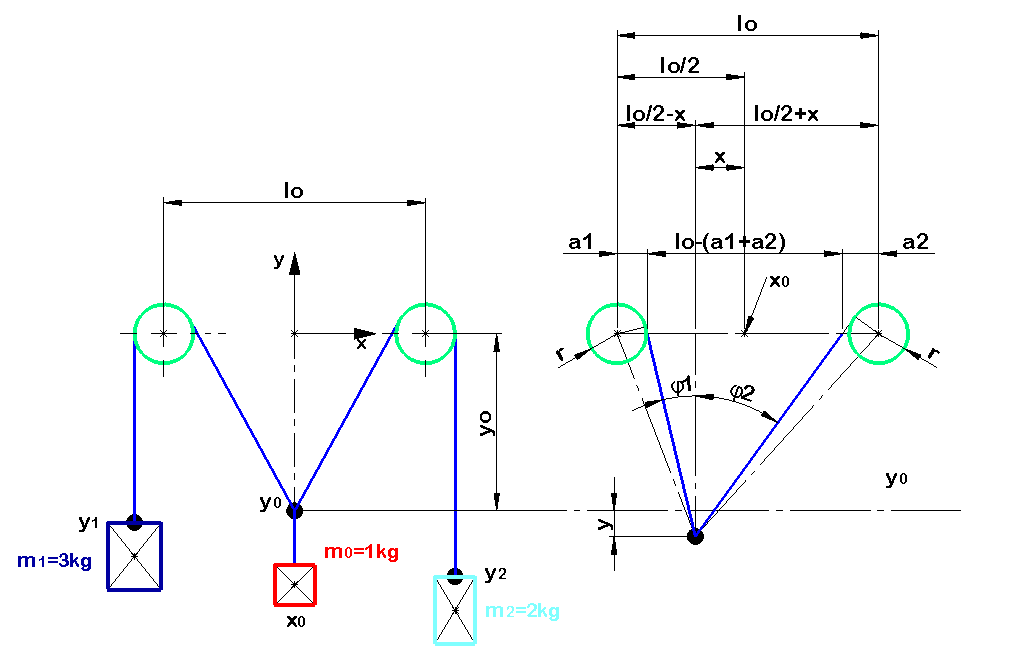
After releasing the weight m0 at this position, the system finds its equilibrium.
Putting the center of the first disk to the origin of the coordinate-system would be advantageous for solving with Lagrangesche Formalism.
The equations should be more simple than.
Viel Erfolg!
Volker
Volker
May 06, 2017
11:33 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 06, 2017
11:33 AM
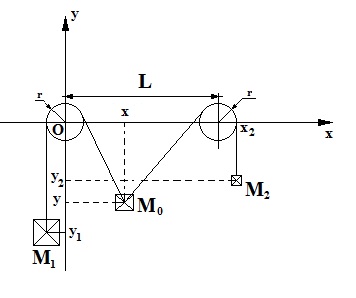
Salve V. L., in fact I will use the Lagrange equations.
We usually choose the origin of the axes in such a way as to make the equations as simple as possible. Valery put it in (L / 2, 0) not in (L / 2, y0). This last is your choice.
Viel Spaß
F. M.
May 06, 2017
11:41 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 06, 2017
11:41 AM
You're right.
I think too it's the best way to choose the origin like you suggested.
Now I try the formalism.
Cappucino now 
Espresso Lagrangesche
tanto divertimento
Volker
Volker
May 06, 2017
03:28 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 06, 2017
03:28 PM
Tried to use the Lagrangesche Method.
creating the differential EQN for the x-direction is ready, but it's very large. (it took a time of 30 minutes!)
Now there is to do the same for the y-direction.
see attachment please.
I'm not sure if both equations will work in a solve block.
What generalized koordinates can we choose for the Lagrangesche, that the equations become more comfortable and smaller?
Maybe with angles?
I really don't know and it seems to me that a solution here with Newton is necessary.
Viel Erfolg!
Volker
Volker
May 07, 2017
01:53 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 07, 2017
01:53 AM
Thanks, Volker!
But es ist zu komplizirt for me.
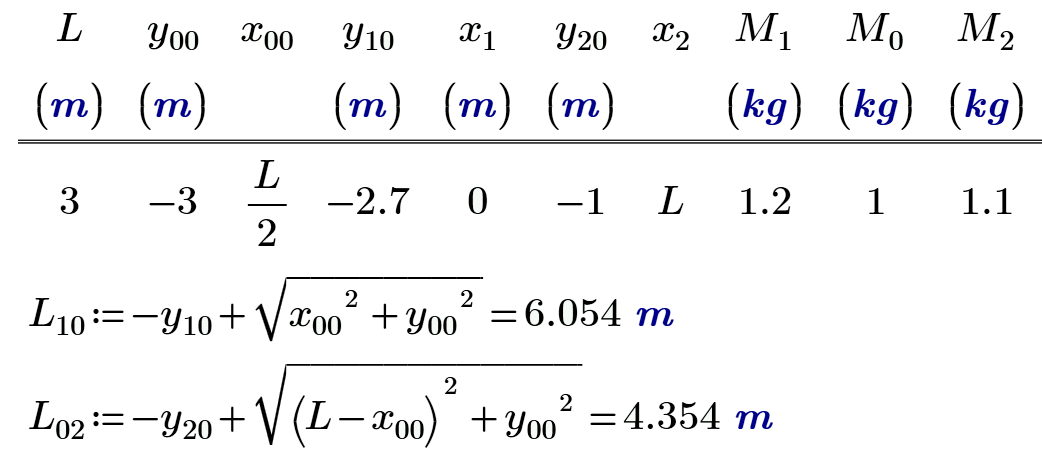
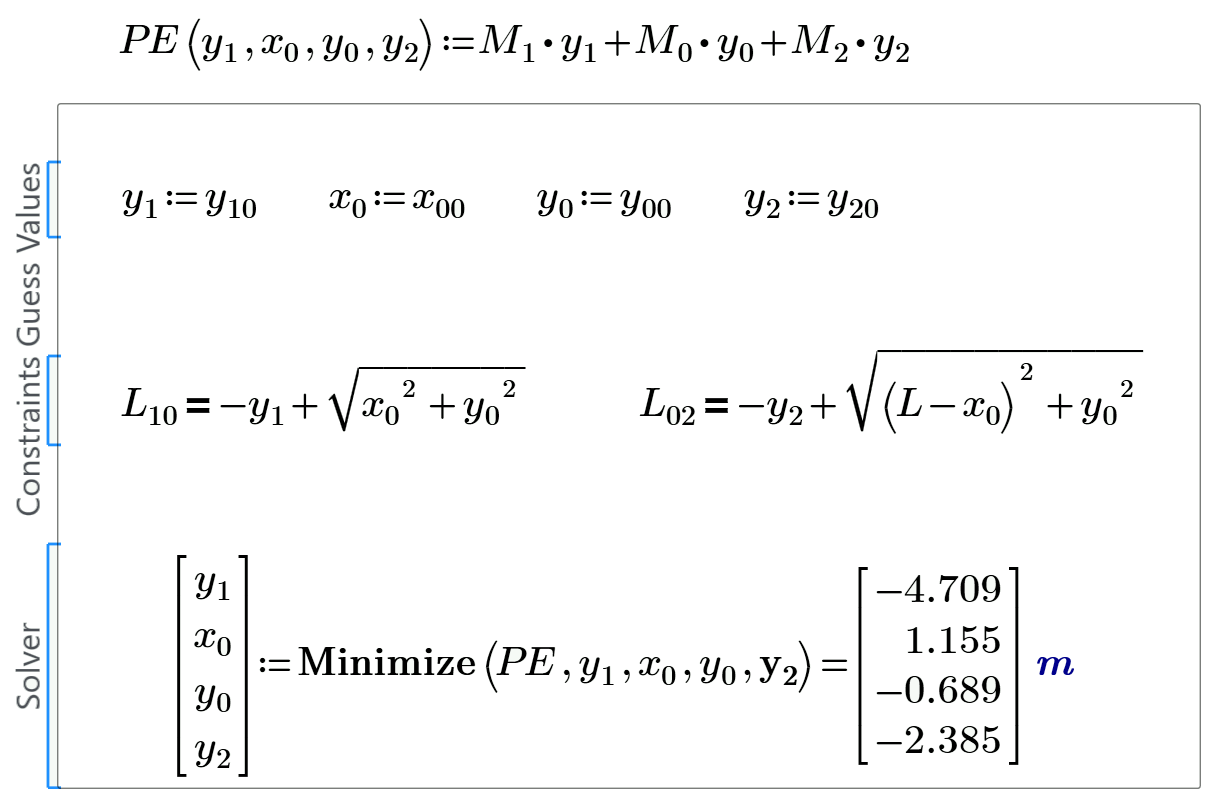
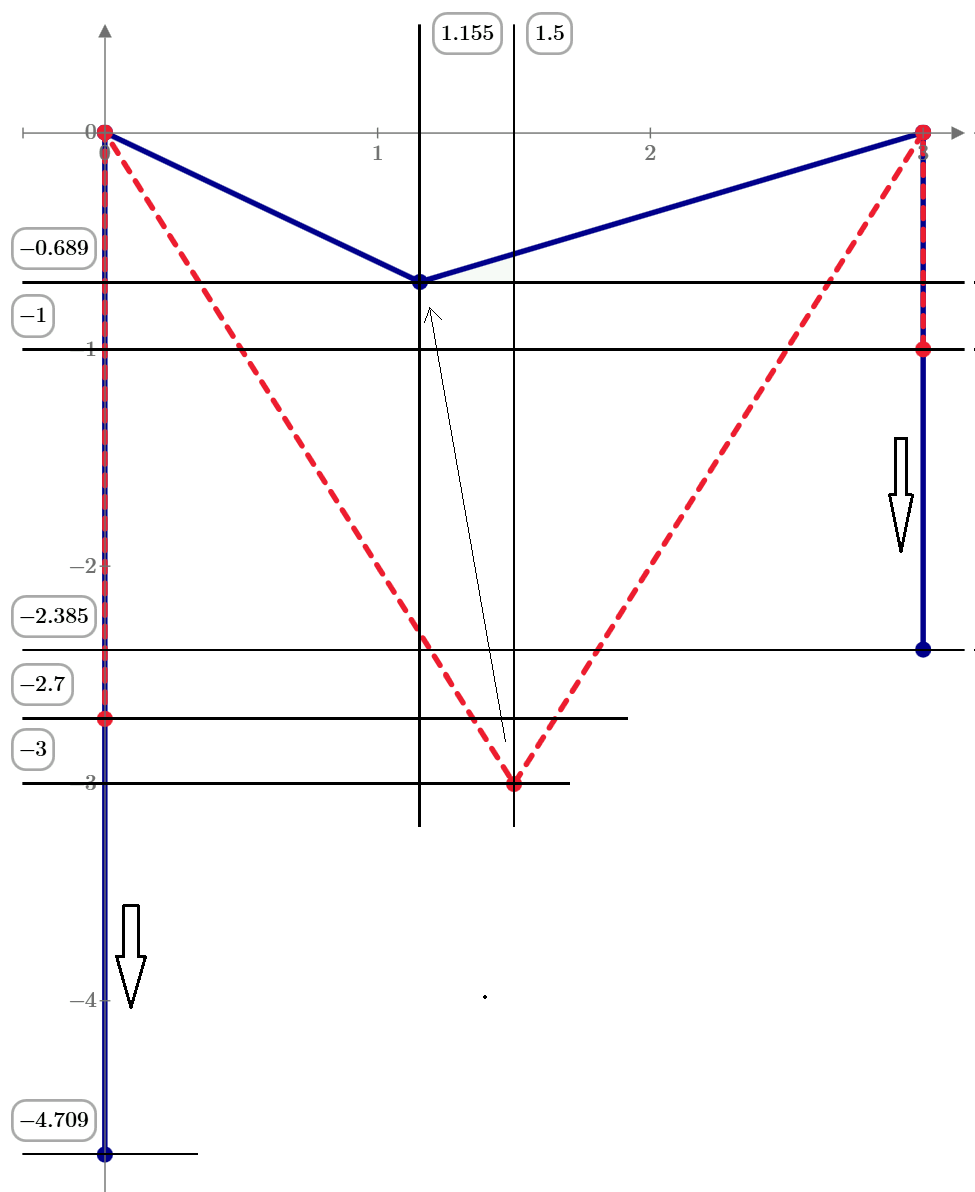
I think we must begin with the static task with r=0 (warum nicht?).
It will be a key to solve the dynamic task.
May 07, 2017
03:30 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 07, 2017
03:30 AM
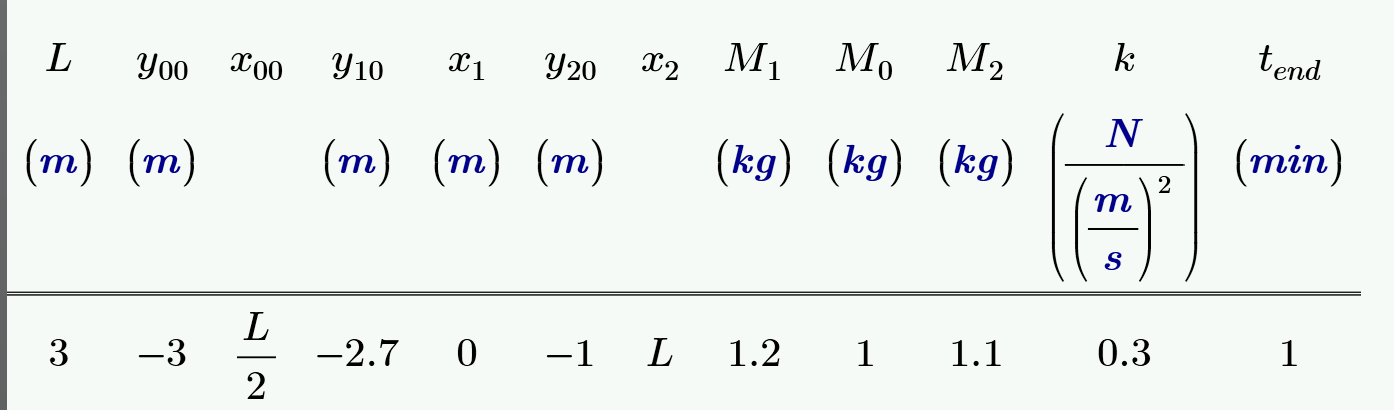
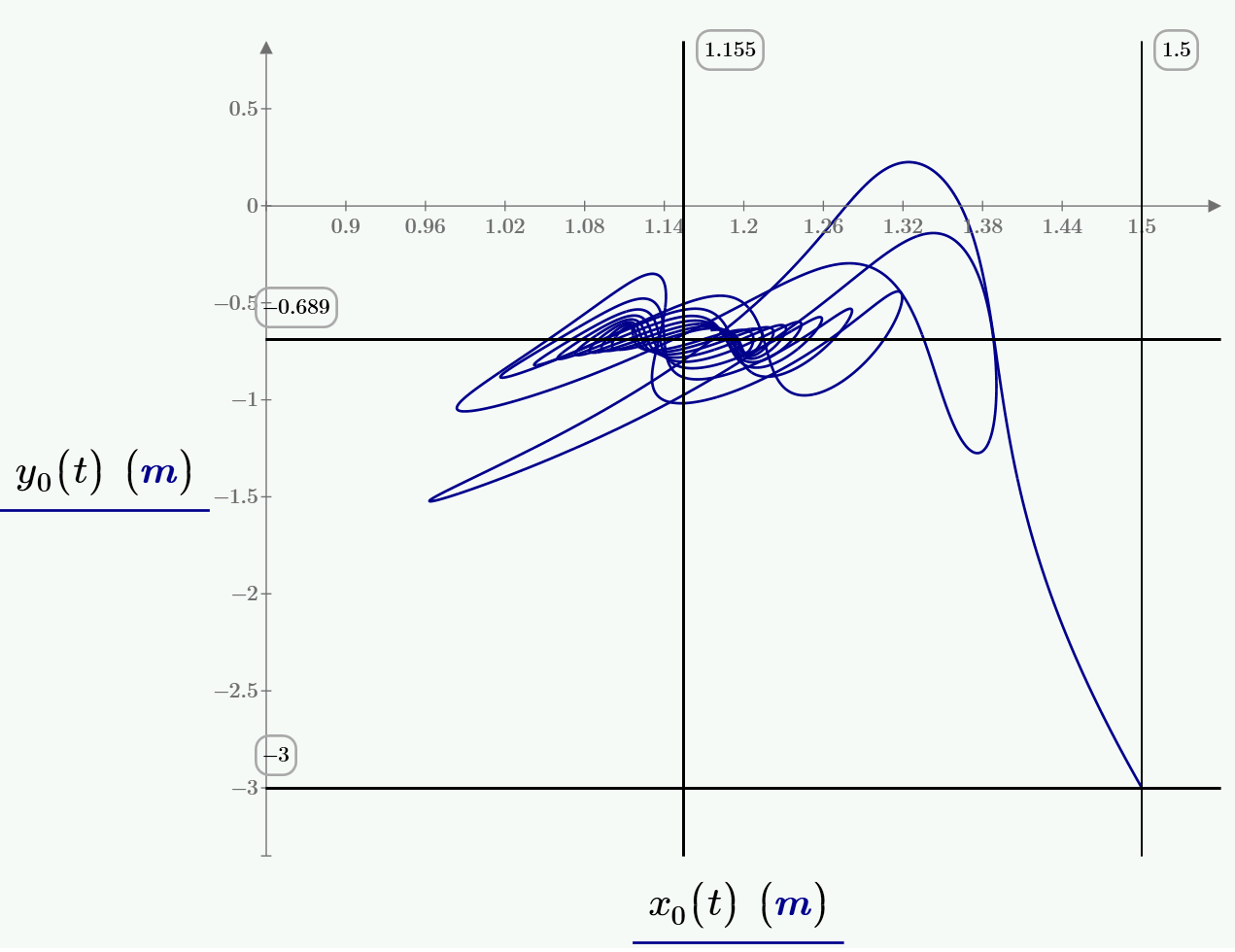
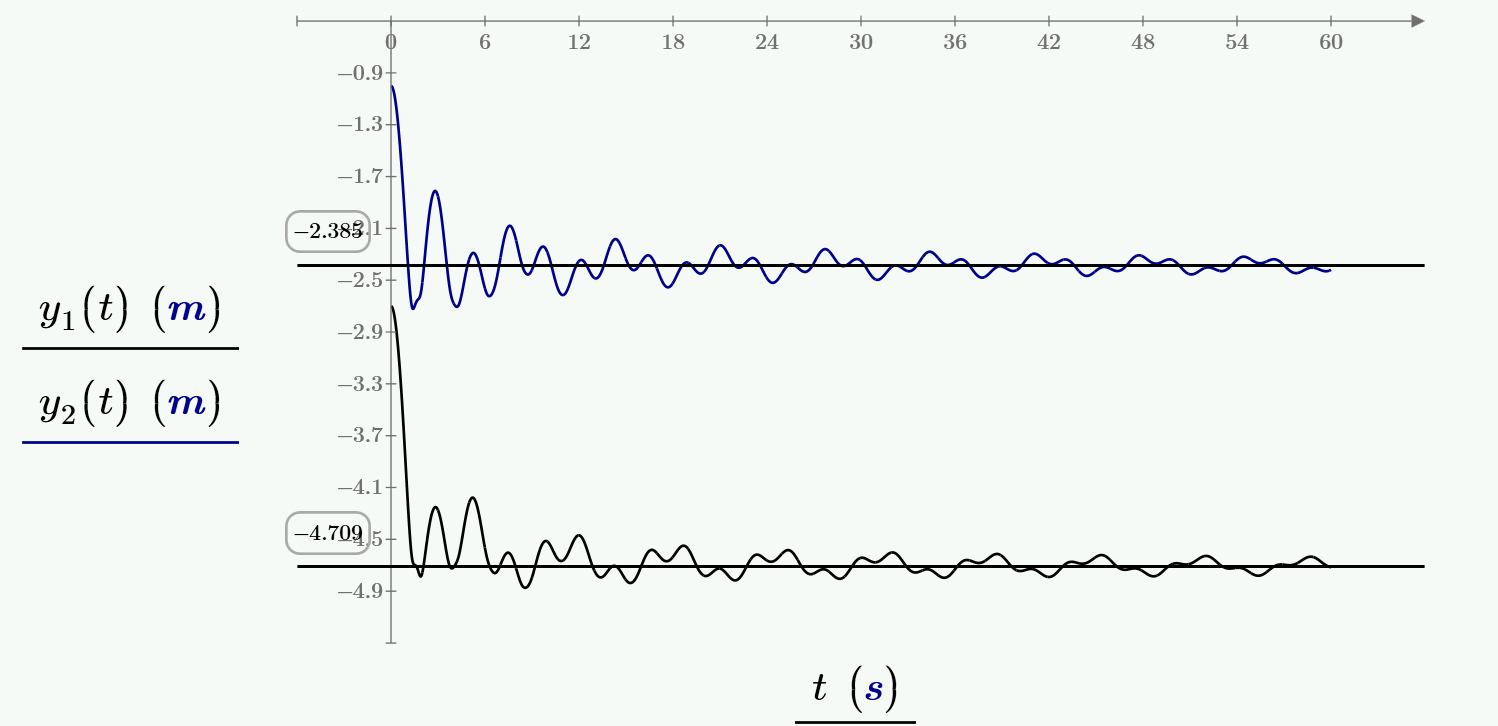
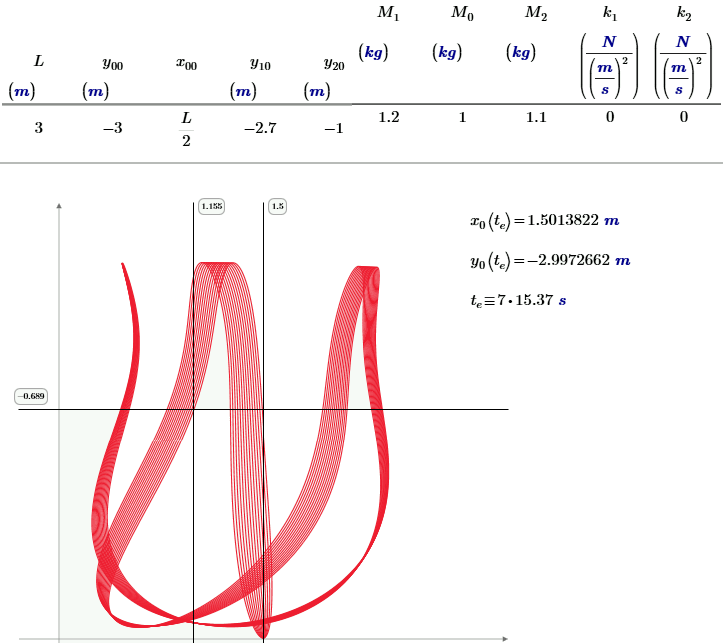
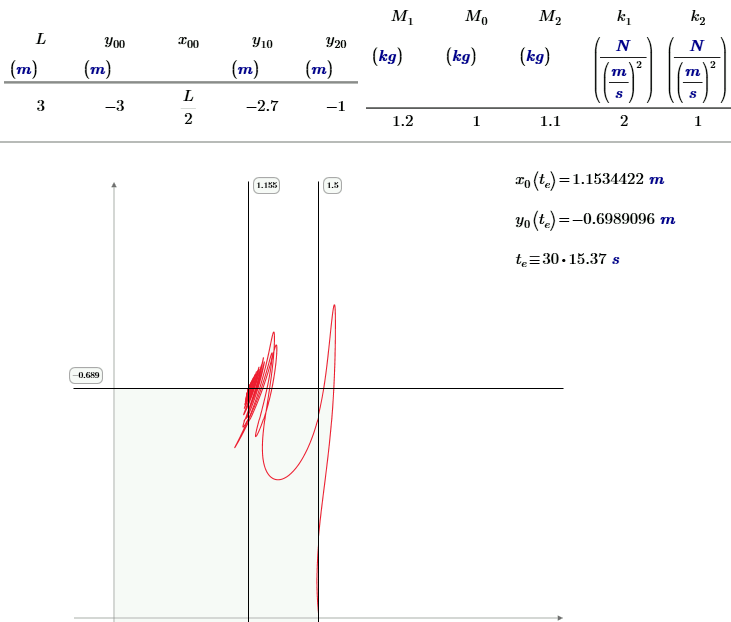
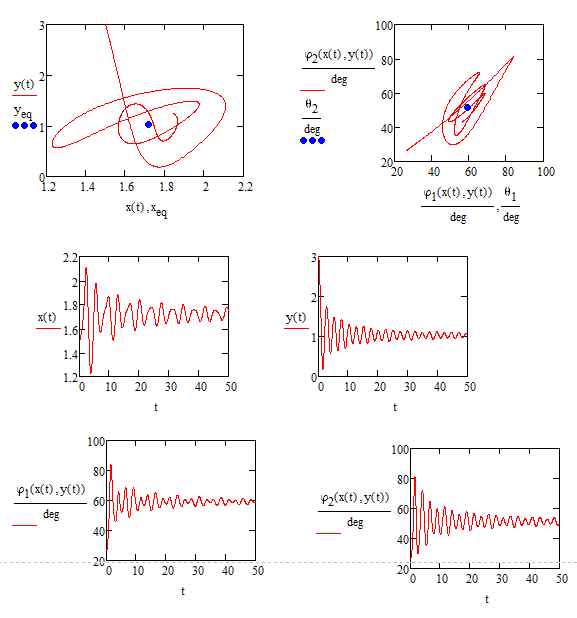
You will laugh, but it seems to me that I solved the problem. We have an attractor at air resistance and one perpetuum mobile without it.

May 07, 2017
03:55 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 09, 2017
06:18 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 09, 2017
06:18 AM
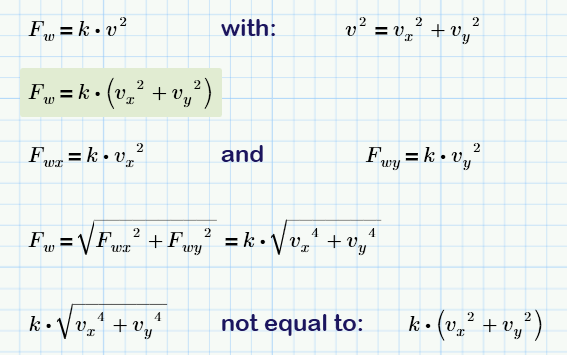
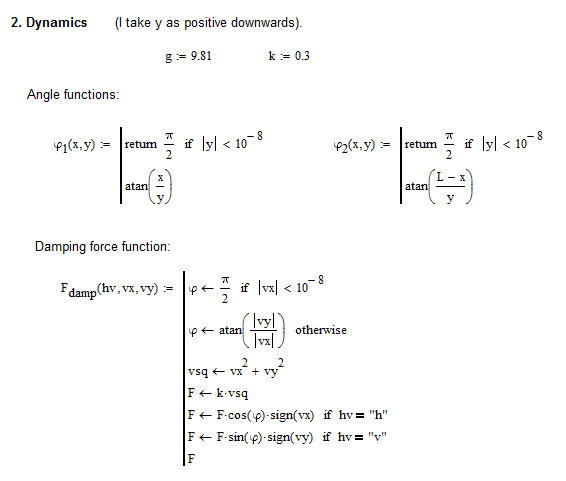
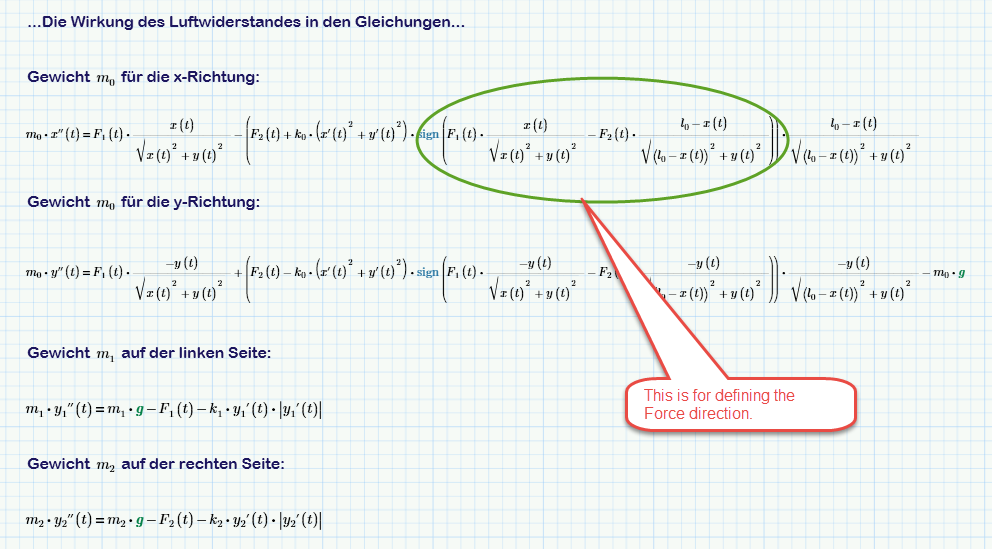
Strictly speaking you haven't implemented the damping correctly here! If the damping force is proportional to velocity squared (or velocity*|velocity|) then you need to calculate the damping force using the resultant velocity and then resolve that along the x and y axes. This will not be the same as calculating x and y damping forces using the separate x and y components of velocity, in general.
Alan
May 09, 2017
07:09 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 09, 2017
07:09 AM
AlanStevens написал(а):
Strictly speaking you haven't implemented the damping correctly here! If the damping force is proportional to velocity squared (or velocity*|velocity|) then you need to calculate the damping force using the resultant velocity and then resolve that along the x and y axes. This will not be the same as calculating x and y damping forces using the separate x and y components of velocity, in general.
Alan
Thanks, Allan!
I know it but we use one simple model!
Help please here Sheets Mathcad 15 and Prime - one bug
May 09, 2017
07:33 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 09, 2017
07:33 AM
Alan,
if I understood you right, you meant this?
Volker
May 09, 2017
08:39 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 09, 2017
08:39 AM
Volker, Yes. We should have Fwx = Fw*cos(theta) and Fwy = Fw*sin(theta) where Fw is as you've defined it and theta = tan^-1(vy/vx).
However, this would only be of importance in a real problem - it doesn't matter too much in a toy problem. It's just the pedant in me pointing it out!!
Alan
May 09, 2017
10:14 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 09, 2017
10:14 AM
Thank you!
Volker
May 11, 2017
05:14 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 11, 2017
05:14 AM
AlanStevens написал(а):
Volker, Yes. We should have Fwx = Fw*cos(theta) and Fwy = Fw*sin(theta) where Fw is as you've defined it and theta = tan^-1(vy/vx).
However, this would only be of importance in a real problem - it doesn't matter too much in a toy problem. It's just the pedant in me pointing it out!!
Alan
One compromise:
May 11, 2017
06:33 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 11, 2017
06:33 AM
Ok. I might as well show my solution using damping in the form I mentioned previously. Note that my worksheet is M15, and first does a static equilibrium calculation, then does the dynamics (only the dynamics part pictured below).

Alan
May 11, 2017
10:11 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 11, 2017
10:11 AM
Thanks, Alan!
But a solution without an animation is not solution.
A solution with one animation is not solution too.
Tree animations are good!
May 12, 2017
09:53 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 12, 2017
09:53 AM
Valery Ochkov wrote:
Thanks, Alan!
But a solution without an animation is not solution.
Ok. Here is a (not very exciting!) animation:
Alan
May 12, 2017
10:07 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 12, 2017
10:07 AM
Sorry, Alan!
I do not see an animation.
We must convert avi to mov and than input it here.
Attach please the avi file - I will convert it and put here!
May 15, 2017
05:19 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 15, 2017
06:53 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 15, 2017
06:53 AM
AlanStevens написал(а):
Ok Valery, thanks. avi file attached.
Alan
Sorry. The solution with animation but without trajectory is not full solution 
May 15, 2017
12:34 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 15, 2017
12:34 PM
Animating a simpler task in Smath Studio
http://en.smath.info/forum/yaf_postst973_Animation-double-pendulum-and-a-pendulum-on-a-spring.aspx
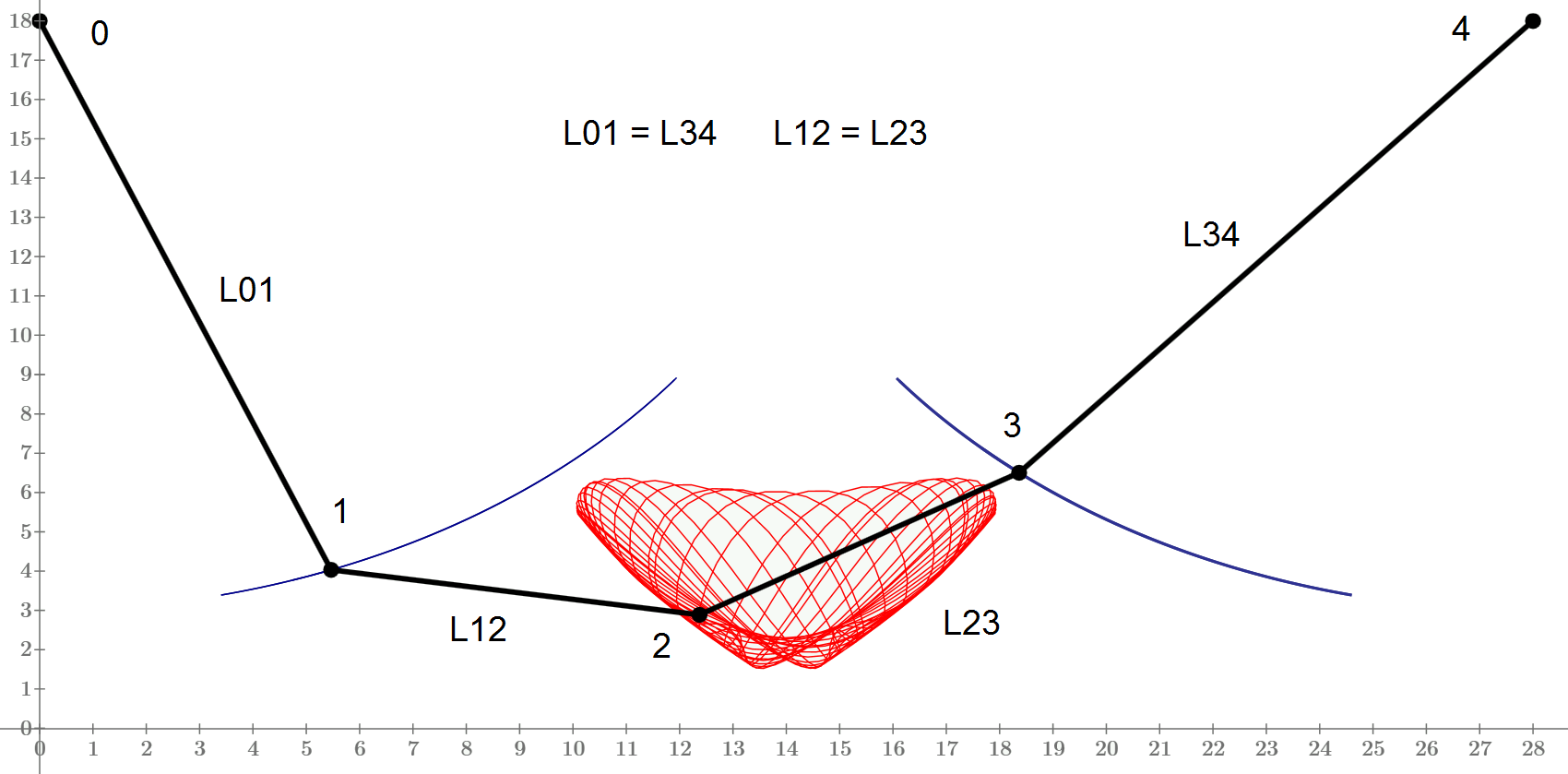
Fluctuations of three loads .The system consists of two extreme loads mass m1 and medium load mass m2 (2m1> m2).If the average load deviate from the equilibrium position, the system begins to oscillate.
May 15, 2017
01:03 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 15, 2017
01:03 PM
Fridel Selitsky написал(а):
Animating a simpler task in Smath Studio
http://en.smath.info/forum/yaf_postst973_Animation-double-pendulum-and-a-pendulum-on-a-spring.aspx
Fluctuations of three loads .The system consists of two extreme loads mass m1 and medium load mass m2 (2m1> m2).If the average load deviate from the equilibrium position, the system begins to oscillate.
Sorry. The solution with animation but without not simple, interest, fine trajectory is not full solution!
May 11, 2017
02:32 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 11, 2017
02:32 PM
Valery Ochkov schrieb:
One compromise:
Maybe we don't need a compromise:
Volker
May 11, 2017
02:47 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 11, 2017
02:47 PM
Zu compliziert for me
Sergey Dovlatov about one compromise:
"Дело происходило в газете "Новый американец". Рубин и Меттер страшно враждовали. Рубин обвинял Меттера в профнепригодности. (Не без основания). Я пытался быть миротворцем. Я внушал Рубину: — Женя! Необходим компромисс. То есть система взаимных уступок ради общего дела. Рубин отвечал: — Я знаю, что такое компромисс. Мой компромисс таков. Меттер приползает на коленях из Джерси-Сити. Моет в редакции полы. Выносит мусор. Бегает за кофе. Тогда я его, может быть, и прощу."
It happened in the newspaper "New American". Rubin and Metter were terribly hostile. Rubin accused Metter of being unfit for work. (Not without reason). I tried to be a peacemaker. I suggested to Rubin: "Eugene!" A compromise is needed. That is, a system of mutual concessions for the sake of the common cause. Rubin answered: - I know what a compromise is. My compromise is this. Metter crawls on his lap from Jersey City. Wash floors in the office. He takes out the garbage. Running for coffee. Then I, perhaps, will forgive him.
May 11, 2017
03:08 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 11, 2017
03:08 PM
Did you try it?
You cant say its zu kompliziert for me without trying it!
Volker
May 11, 2017
03:56 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 11, 2017
03:56 PM
Volker Lehner написал(а):
Did you try it?
You cant say its zu kompliziert for me without trying it!
You are right.
May 07, 2017
06:29 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 07, 2017
06:29 AM
Thanks, Volker!
But es ist zu komplizirt for me.
I think we must begin with the static task with r=0 (warum nicht?).
It will be a key to solve the dynamic task.
And meanwhile, i think so too.
I try to solve it now with Newton by myself.
Let's see what F.M. makes with the Lagrangesche.
Volker
May 07, 2017
07:44 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 07, 2017
07:44 AM
I do not show the picture with solution!
You can see the attach or not see - try to create yourself and compare than!




