
Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
Please log in to access translation
Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
Community Tip - Learn all about PTC Community Badges. Engage with PTC and see how many you can earn! X
Translate the entire conversation x
Please log in to access translation
Options
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
Hello, World! See my 1-st Prime Animation!
Apr 22, 2017
08:01 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Labels:
- Labels:
-
Other
106 REPLIES 106
Apr 28, 2017
02:28 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 30, 2017
07:15 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 30, 2017
07:15 AM
From one static position (3 mass on strings) to second one (3 masses on springs:
Apr 30, 2017
09:44 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 30, 2017
09:44 AM
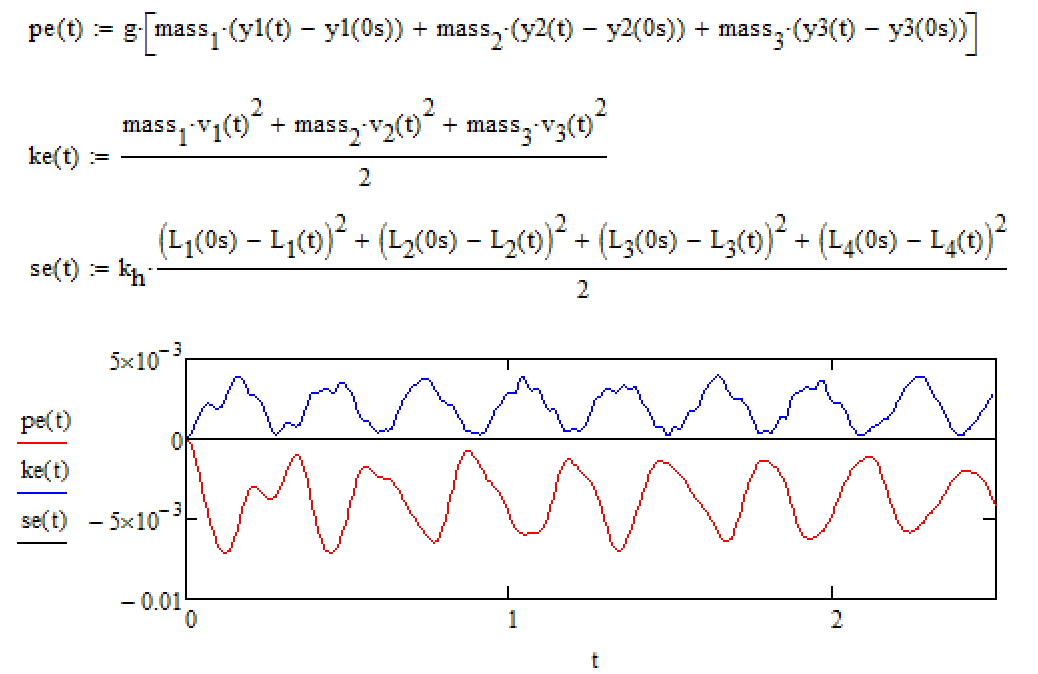
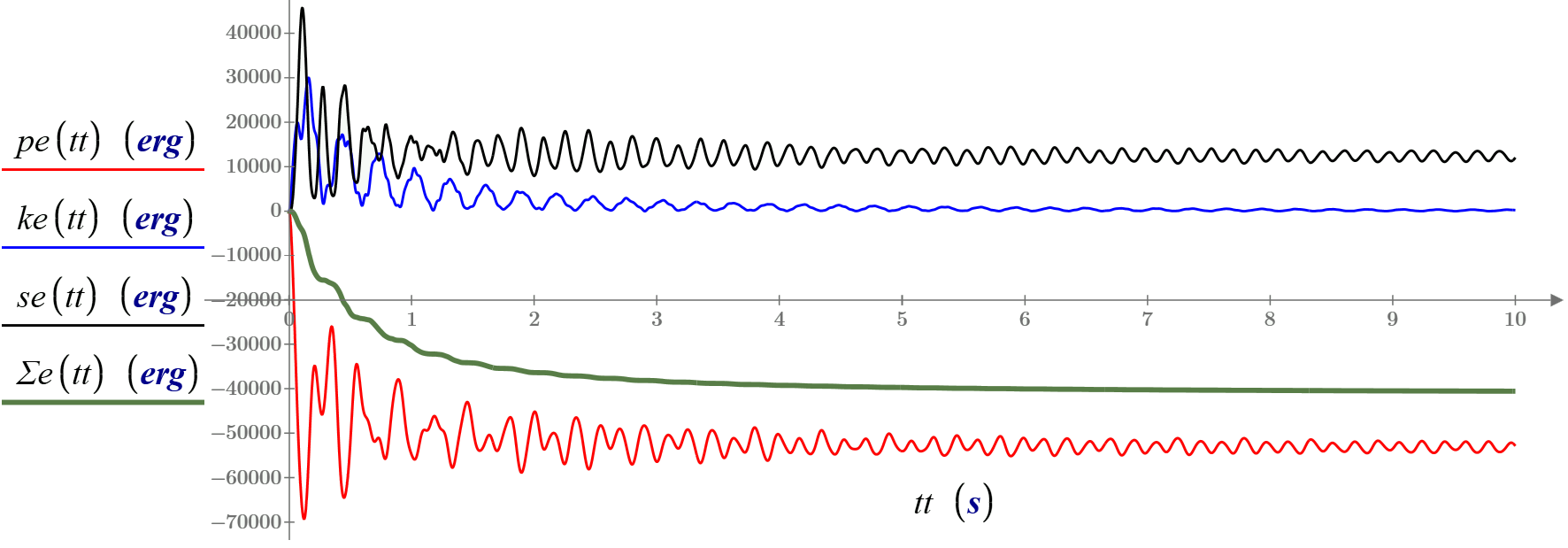
But I do not understand - where is here an error.
pe - Potential energy
ke - Kinetic energy
se - Energy of springers
Apr 30, 2017
01:11 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 30, 2017
01:11 PM
Hi Valery,
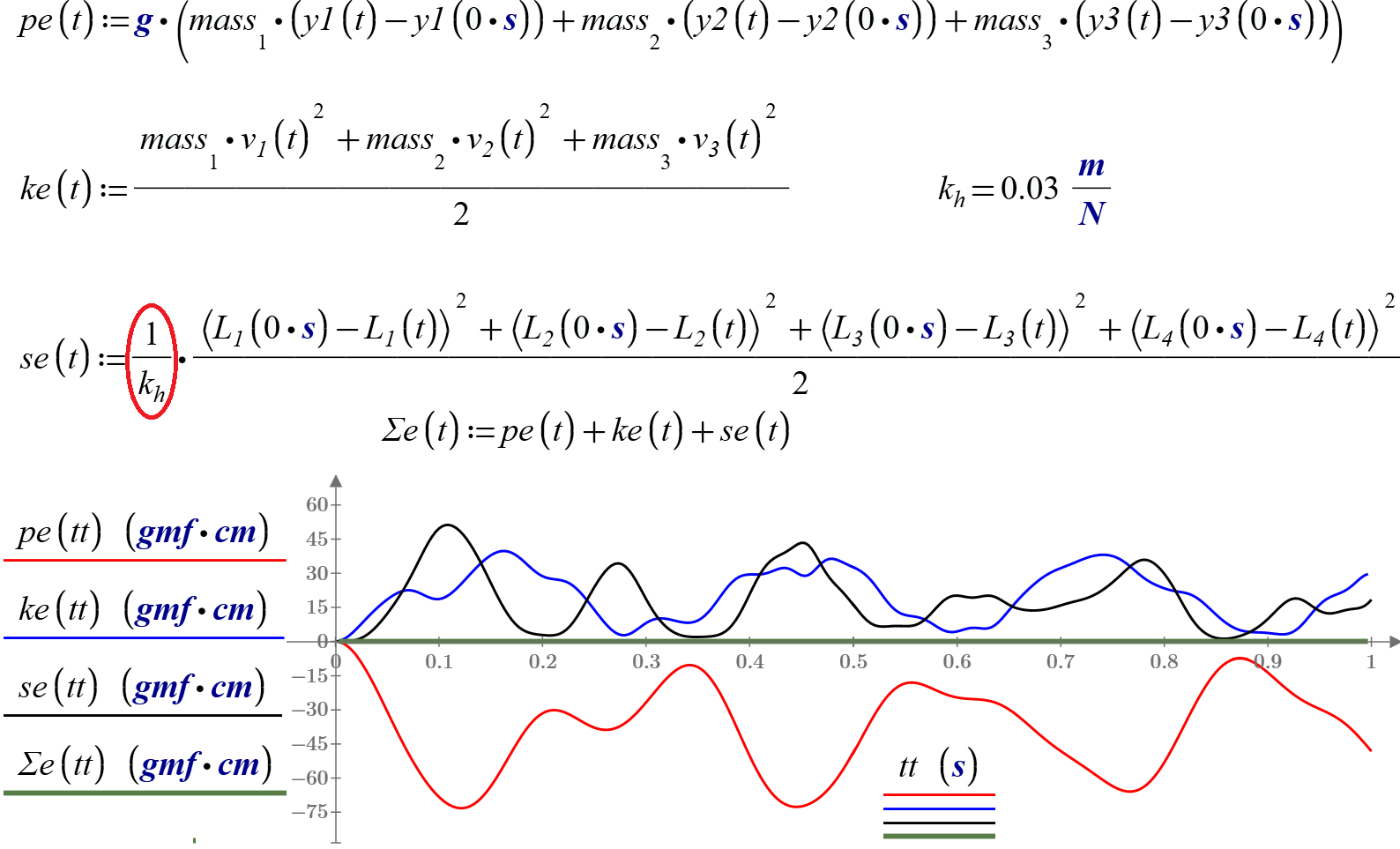
if we pull the weight m3, so we have a basically spring-energy in the system which should be taken into account of se(t).
try to add these energys and let's see what happens.
Volker
Volker
Apr 30, 2017
01:26 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 30, 2017
01:26 PM
Units, Units and one more Units!
Apr 30, 2017
01:22 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 30, 2017
01:22 PM
I have converted the sheet into Prime.
Prime works with units by the Odesolve function and points me the bug!
But Prime has not an animation!
Apr 30, 2017
01:42 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 30, 2017
01:42 PM
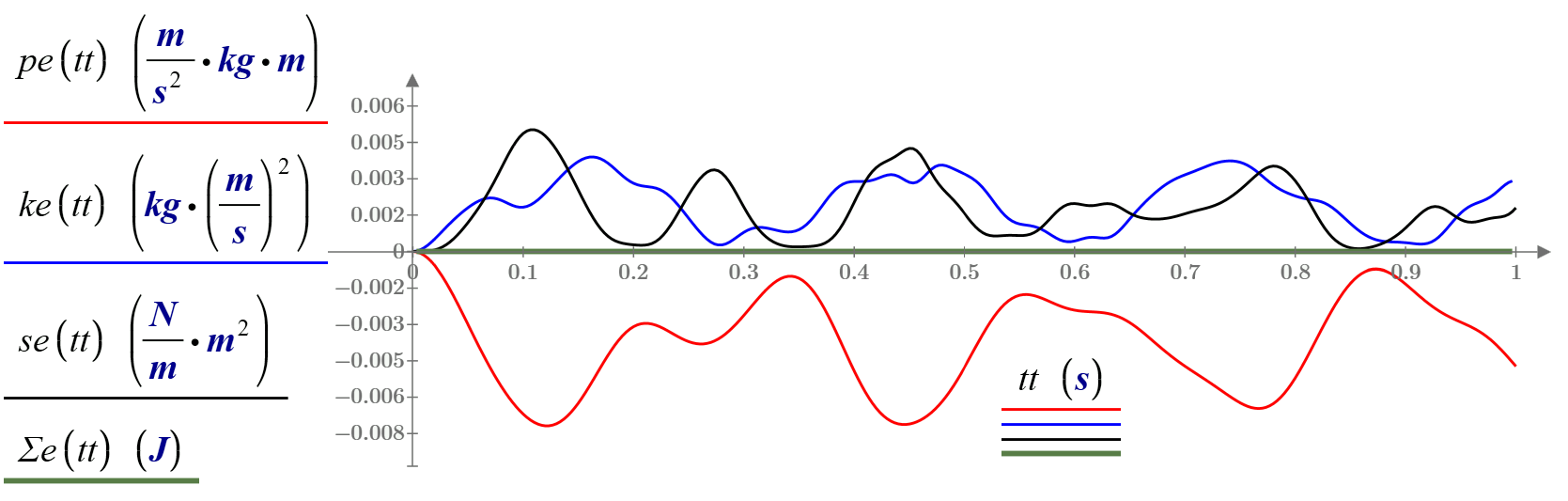
Correct units
Apr 30, 2017
01:54 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 30, 2017
01:54 PM
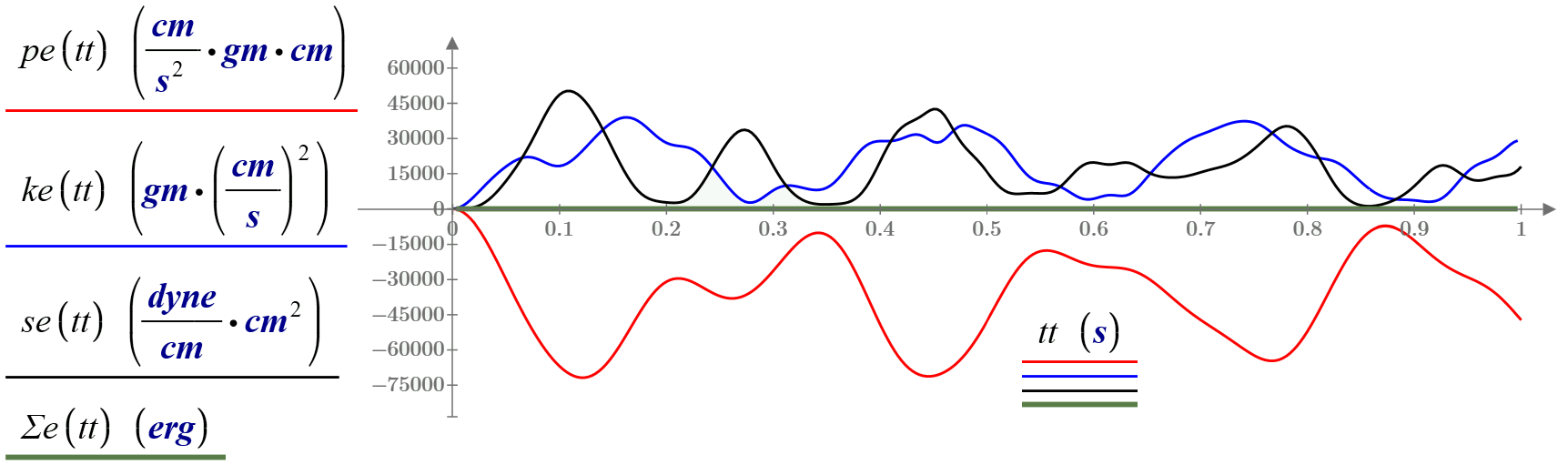 For physics
For physics
Apr 30, 2017
03:18 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 30, 2017
03:18 PM
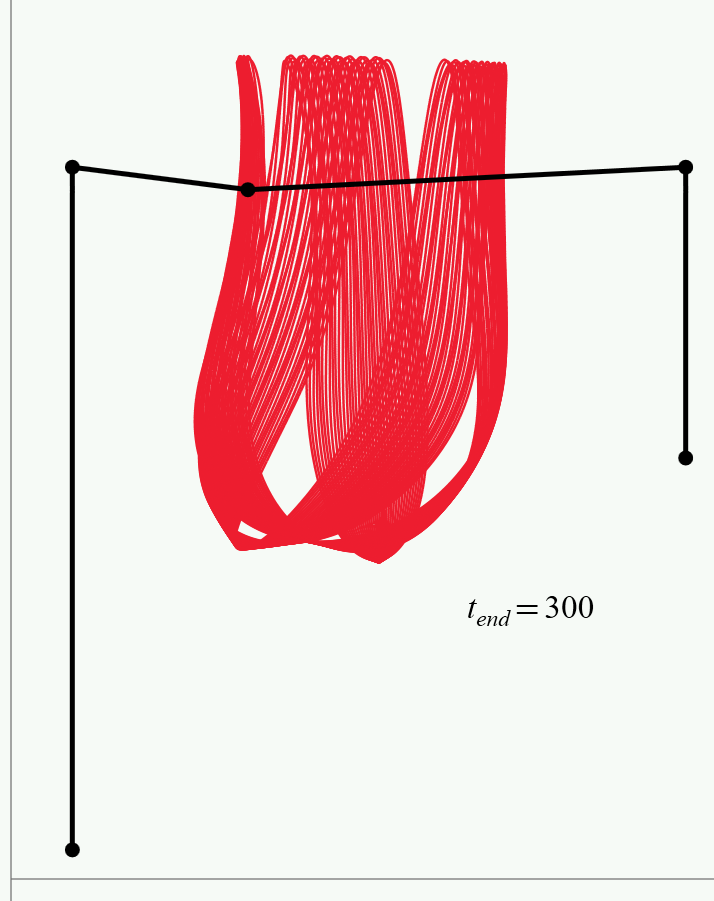
With friction - energy dissipation
(16 DEs)
Apr 30, 2017
05:57 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 30, 2017
05:57 PM
...let's end it like this:

Anyway: I'm missing Equations derived from a dynamic balance in accordance with your outstanding simulation.
Volker
May 15, 2017
03:21 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 15, 2017
03:21 AM
ValeryOchkov написал(а):
Fine too
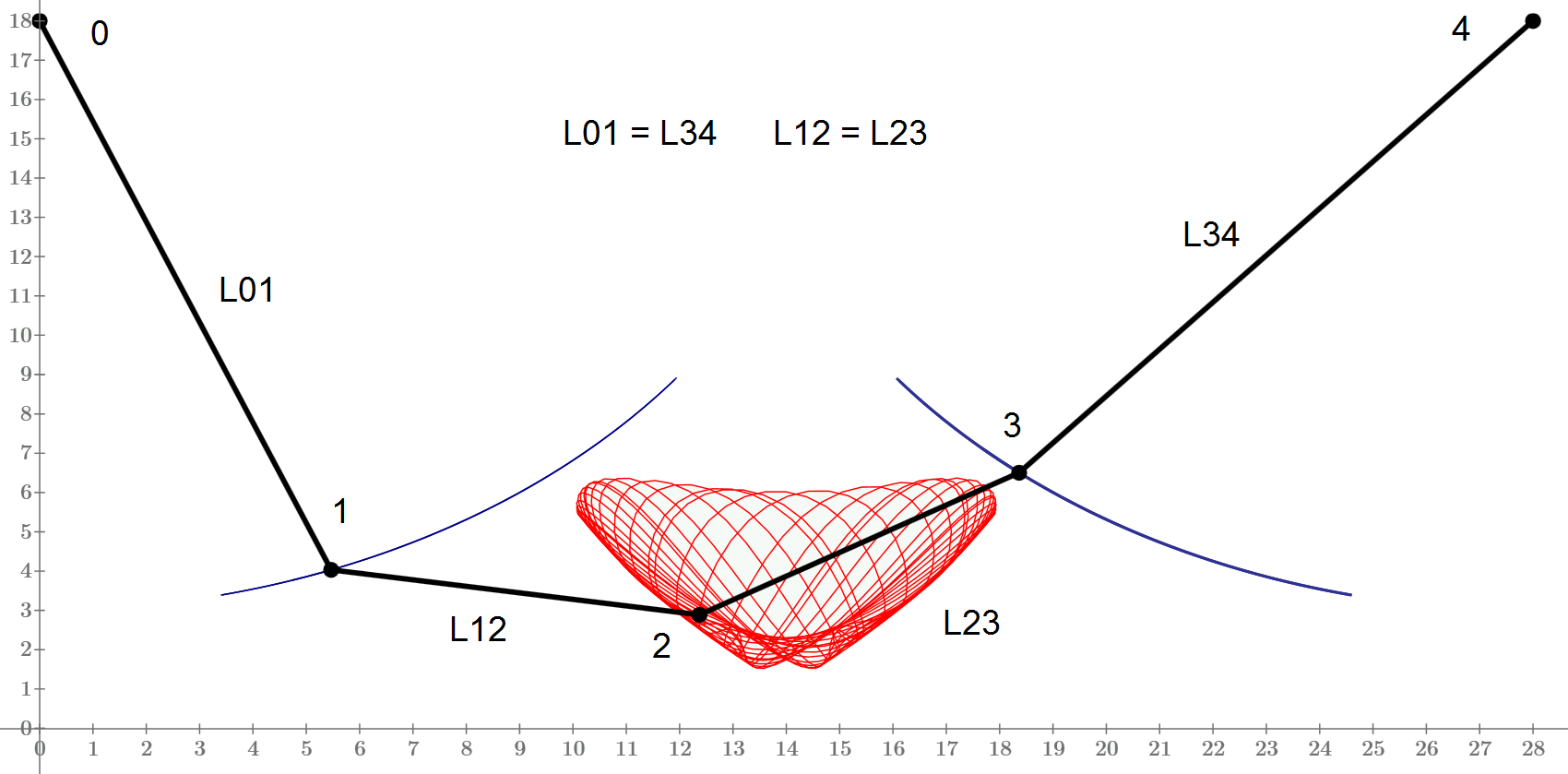
Похоже ли это на улыбку, на улыбку женщины? Мы уже получали тюльпан!
Does this sound like a smile, the smile of a woman? We received Tulip!
Apr 28, 2017
08:55 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 28, 2017
08:55 AM
Valery,
I need help for better understanding according to your summation of Forces of pendulum-3-hard-linking.mcdx.
I created a dynamic balance, which you can see in the sketch.
The direction of force of the slowness is allways in the opposite direction of the acceleration vektor (D' Lambert's Law)
I confirm with your equations in x-direction, but in y-direction we have different equations.
The body mass m1 moves to the left in direction of the negative x-achses and it moves downwards in direction to the negative y-achses.
So the body mass m1 accelerates (increasing speed) downwards and to the left.
I am confused if i compare my equations with yours.
How did you get it, can you show me with a short sketch?
Can you please tell me what is fact here?

Thank you!
Volker
Volker
Apr 28, 2017
12:38 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 28, 2017
12:38 PM
Sorry, Volker!
I input equations and see an animation.
If the animation is fine - equations are correct.
If the animation is not fine - I change equations and see new animation!
And I think about physic of course. But in second line 
Main is a fine animation!
We have animation in Mathcad 15 but cannot work with units in Odesolve.
We can work with units in Odesolve in Prime, but Prime have not animation!
Нет в жизни счастья! 
Apr 29, 2017
06:08 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 29, 2017
06:08 AM
Volker Lehner написал(а):
Valery,
I need help for better understanding according to your summation of Forces of pendulum-3-hard-linking.mcdx.
I created a dynamic balance, which you can see in the sketch.
The direction of force of the slowness is allways in the opposite direction of the acceleration vektor (D' Lambert's Law)
I confirm with your equations in x-direction, but in y-direction we have different equations.
The body mass m1 moves to the left in direction of the negative x-achses and it moves downwards in direction to the negative y-achses.
So the body mass m1 accelerates (increasing speed) downwards and to the left.
I am confused if i compare my equations with yours.
How did you get it, can you show me with a short sketch?
Can you please tell me what is fact here?
Thank you!
Volker
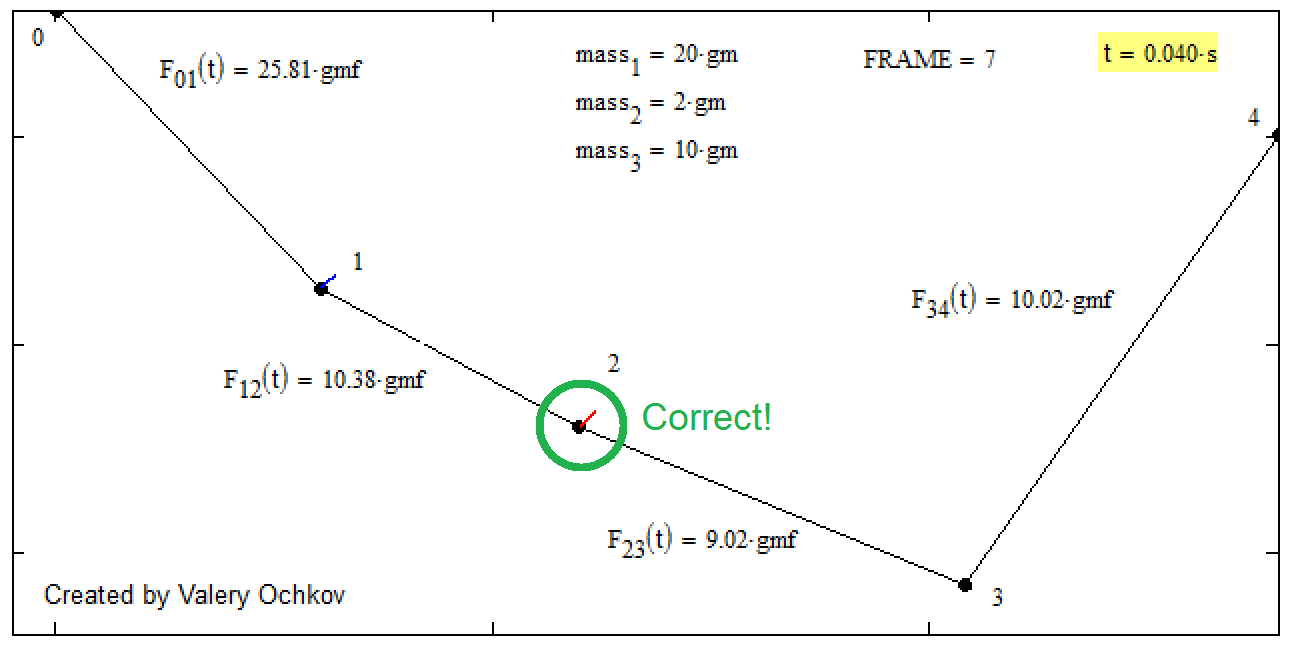
I have change in my model one minus to plus and see an error in the animation: the point 2 must go down not up! And forces values are not correct!
At FRAME=4 and more I got - no solution.
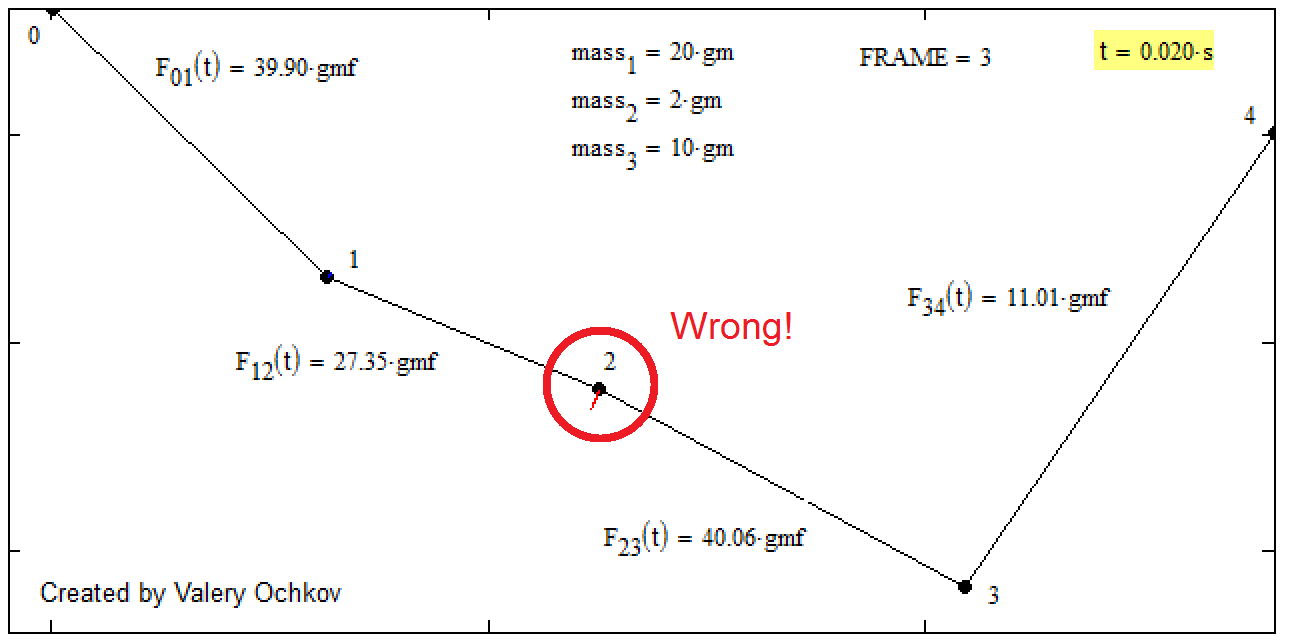
When minus is returned - all is correct - the point 2 goes down! And we can change FRAME value 7, 8, 8 etc and see future animation's frames!
May 01, 2017
09:52 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 01, 2017
09:52 AM
Great stuff Val!
May 01, 2017
01:52 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 01, 2017
01:52 PM
Toby Metcalf написал(а):
Great stuff Val!
Thanks, Toby!
I hope the article will be interesting.
I would like to translate it in English and publish.
Can you help me?
Val
May 01, 2017
02:14 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 01, 2017
02:14 PM
My Russian is a bit rusty Val 🙂
How long is the article?
Best,
Toby
May 01, 2017
02:33 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 01, 2017
02:33 PM
Hi Toby,
it's about 29 Pages.
It's allways very interresting, how the comunity solves problems and brings many Ideas to solve them.
Best, Volker
Volker
May 01, 2017
02:56 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 01, 2017
02:56 PM
Volker Lehner написал(а):
Hi Toby,
it's about 29 Pages.
It's allways very interresting, how the comunity solves problems and brings many Ideas to solve them.
Best, Volker
Many Soviet jokes began this way: "Russian, German and American somehow got together and began to solve one problem..." 
May 01, 2017
02:37 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 01, 2017
02:37 PM
Toby Metcalf написал(а):
My Russian is a bit rusty Val 🙂
Google Translator + Toby = Success!
Toby Metcalf написал(а):
How long is the article?
See please the attach!
Try please the part 1, but better 1, 2 and 3
I hope you will someone know new about Mathcad and about work with it!
May 02, 2017
09:23 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 02, 2017
09:23 AM
I would be using Google Translate - not sure if that is the best method
May 02, 2017
12:39 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 02, 2017
12:39 PM
Thanks, Toby!

May 12, 2017
02:57 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 12, 2017
02:57 AM
The variant of the article from 12/05/2017 (with a divertissement) in attach
May 12, 2017
07:03 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
May 12, 2017
07:03 AM
Very nice!
I'm missing that womans in your....
and
You still owe me an answer in this matter:
Volker
Jun 06, 2017
10:47 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Jun 09, 2017
12:17 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Jun 09, 2017
12:17 AM
Editorial board of one authoritative joutal reviewed the article and recommended its publication in one collection of articles.
Jun 29, 2017
08:47 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Jun 29, 2017
08:47 AM
Hi, Volker!
Check please the last page (with english text) of our article in attach.
Val
Jun 30, 2017
04:07 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Jun 30, 2017
04:07 PM
Hi Valery,
Perfect!
Volker
Volker
Jul 01, 2017
08:37 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Jul 01, 2017
08:37 AM
Valery,
Please change my Adress in the Article to:
**«Mechanical Engineering Office»
Eschenweg 4, 71576 Burgstetten, Germany

Now I'm a self made man ![]()
Thank you!
Volker
Jul 01, 2017
05:30 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Jul 01, 2017
05:30 PM
Hi Valery,
maybe some links in the Article could make problems.
When executing some links at the artikels text passage it's leading to an error but after confirm them, the link will open the website.
Is it because of the new Forum we have now?
Volker
Volker




