
Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
Please log in to access translation
Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
Community Tip - Visit the PTCooler (the community lounge) to get to know your fellow community members and check out some of Dale's Friday Humor posts! X
Translate the entire conversation x
Please log in to access translation
Options
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
Input is a function of a state variable
Aug 27, 2015
02:52 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Aug 27, 2015
02:52 PM
Input is a function of a state variable
I have a real life work problem I'm attempting to use MathCAD to solve. I'm computing the response time history of a coasting rotation inertia and at time zero reverse motor torque is applied. I have an 8th order state space model and I'm using Rkadapt to solve. The motor torque is a function of shaft speed and is thus a function of one of the state variables. I have the function as tabular data (lookup table). Any suggestions on how to formulate the motor torque?
Solved! Go to Solution.
Labels:
- Labels:
-
Statistics_Analysis
ACCEPTED SOLUTION
Accepted Solutions
Aug 27, 2015
05:05 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Aug 27, 2015
05:05 PM
Andy Stevenson wrote:
I don't think it's that simple but I've been wrong before. As the numerical integration moves forward in time, the input torque is a function of one of the computed states. So to use interpolation, I'd have to integrate for a few milliseconds, interpolate a new torque value based on shaft speed at the end of the integration, restart the integration with the new torque value and so on.
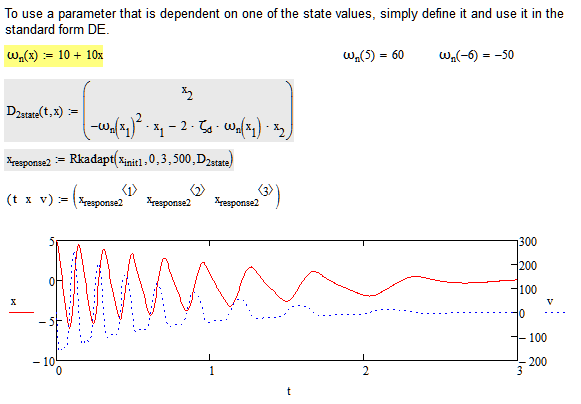
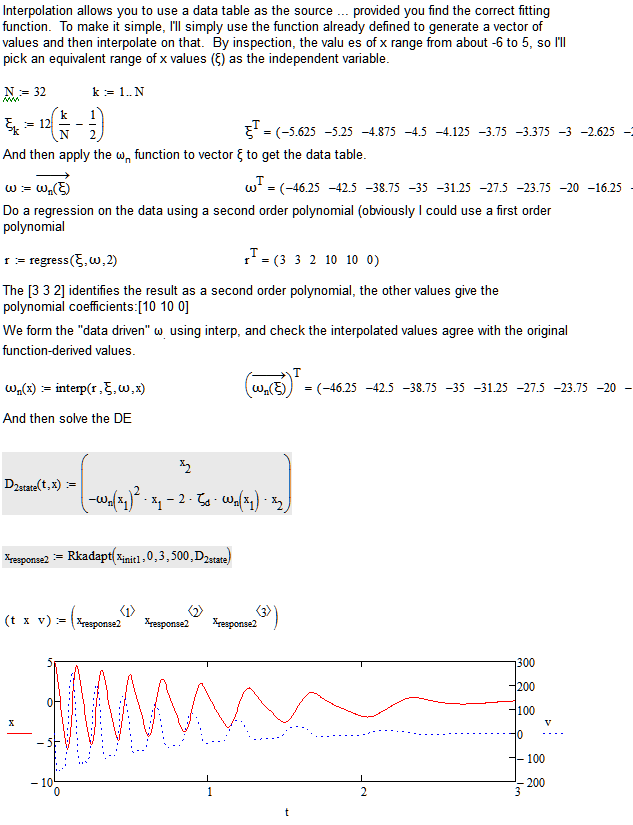
It depends upon what you're doing and how you're trying to do, but, yes, you're right. However, this isn't really a problem as far as Mathcad is concerned if you include the interpolation function in your DE, as in the example below. If you have a reasonably good fit to your data from one of the fitting functions then you could improve the efficiency by explicitly writing the parameters into the generic fitted function (eg, write a polynomial function using the regress parameters in the case below); this should improve performance if this turns out to be an issue.
Stuart
8 REPLIES 8
Aug 27, 2015
03:10 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Aug 27, 2015
03:10 PM
Andy Stevenson wrote:
I have a real life work problem I'm attempting to use MathCAD to solve. I'm computing the response time history of a coasting rotation inertia and at time zero reverse motor torque is applied. I have an 8th order state space model and I'm using Rkadapt to solve. The motor torque is a function of shaft speed and is thus a function of one of the state variables. I have the function as tabular data (lookup table). Any suggestions on how to formulate the motor torque?
You could look at the interpolation functions; look up interp in Help.
Stuart
Aug 27, 2015
03:18 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Aug 27, 2015
03:18 PM
I don't think it's that simple but I've been wrong before. As the numerical integration moves forward in time, the input torque is a function of one of the computed states. So to use interpolation, I'd have to integrate for a few milliseconds, interpolate a new torque value based on shaft speed at the end of the integration, restart the integration with the new torque value and so on.
Aug 27, 2015
05:05 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Aug 27, 2015
05:05 PM
Andy Stevenson wrote:
I don't think it's that simple but I've been wrong before. As the numerical integration moves forward in time, the input torque is a function of one of the computed states. So to use interpolation, I'd have to integrate for a few milliseconds, interpolate a new torque value based on shaft speed at the end of the integration, restart the integration with the new torque value and so on.
It depends upon what you're doing and how you're trying to do, but, yes, you're right. However, this isn't really a problem as far as Mathcad is concerned if you include the interpolation function in your DE, as in the example below. If you have a reasonably good fit to your data from one of the fitting functions then you could improve the efficiency by explicitly writing the parameters into the generic fitted function (eg, write a polynomial function using the regress parameters in the case below); this should improve performance if this turns out to be an issue.
Stuart
Aug 27, 2015
09:05 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Aug 27, 2015
09:05 PM
But of course. Why didn't I see that? I don't have the data in front of me presently to know whether I can fit a decent curve to it or not but the interpolation option is a viable backup plan. Thanks again.
Aug 28, 2015
08:20 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Aug 28, 2015
08:20 AM
Do you have any suggestions for modeling stiction? Seems life a similar approach would work but modeling the stiction as a piece wise linear function of shaft speed and direction with speeds around zero causing coefficient of friction to increase and then converting to sliding friction outside the "zero" speed window.
Aug 28, 2015
09:01 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Aug 28, 2015
09:01 AM
Andy Stevenson wrote:
Do you have any suggestions for modeling stiction? Seems life a similar approach would work but modeling the stiction as a piece wise linear function of shaft speed and direction with speeds around zero causing coefficient of friction to increase and then converting to sliding friction outside the "zero" speed window.
That should work. I don't know anything about friction (having forgotten most of my O-Level physics!), but something like this?

Stuart
Aug 28, 2015
09:02 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Aug 28, 2015
09:02 AM
You rock dude!
Aug 28, 2015
07:15 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Aug 28, 2015
07:15 PM
Andy Stevenson wrote:
You rock dude!
True. 
But you try telling that to the young folk of today, and they don't believe you!




