
Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
Community Tip - You can Bookmark boards, posts or articles that you'd like to access again easily! X
- Community
- PTC Education
- PTC Education Forum
- Re: Is it possible to create a "winch" that pulls ...
Options
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
Is it possible to create a "winch" that pulls a rope to raise/lower
Oct 17, 2014
05:39 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Oct 17, 2014
05:39 PM
Is it possible to create a "winch" that pulls a rope to raise/lower
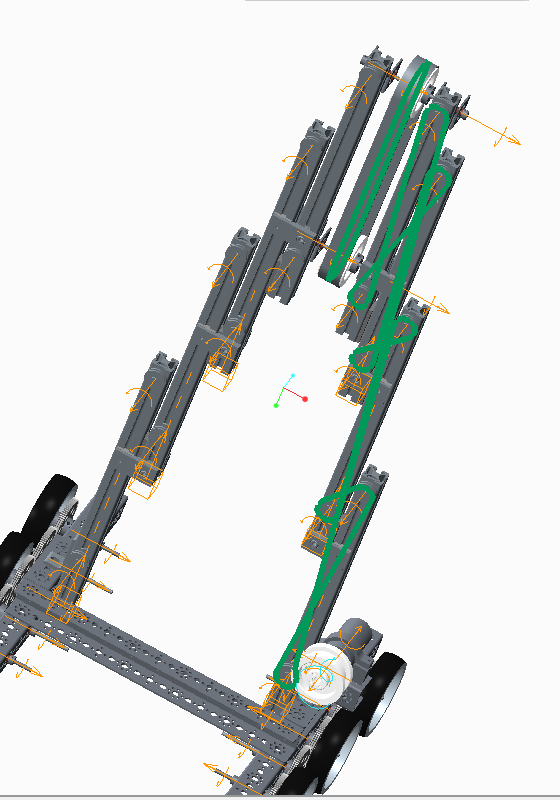
Attached are two photos and the entire robot assembly. Trying to figure out a way to "mechanize" the linear slides. Basically there is a rope/wire that wraps around each pulley. The main wheel/pulley turns to "pull it tight" causing it to raise. And then unwinds to lower.
I know in the picture the belt mechanism is not wired correct but it wants to wrap such it is continuous. If Creo can't really draw it, is there a method to control the motion from the motor such that as it rotates, the linear slides go up and down.
Solved! Go to Solution.
ACCEPTED SOLUTION
Accepted Solutions
Oct 20, 2014
08:18 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Oct 20, 2014
08:18 AM
OK so I took your models and deleted the belt connections out of them and created a gear pair connection between the motor pin joint and the right side top slider joint with a 50mm/revolution user defined property. The lift now operates as you would expect. I am attaching a video. I hope this answers your question.
Thanks,
Jordan
2 REPLIES 2
Oct 17, 2014
06:01 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Oct 17, 2014
06:01 PM
You can do two things... you can create gear connections which can convert "rotary motion" to linear (rack and pinion), and you can define multiple servo motors that you sync up with user defined motion plots. Of course, you also have direct user defined ratio driven gear connections that can be calculated back to a servo motor.
Quite often, I find myself "interpolating" motion profiles from other sources than the acting source. Of course, you cannot regenerate the rope during a motion analysis, so this too will not be possible in a captured analysis. However, to obtain the results you want for analysis purposes, you can do step by step calculations and moves to see what is happening in your mechanism.
Oct 20, 2014
08:18 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Oct 20, 2014
08:18 AM
OK so I took your models and deleted the belt connections out of them and created a gear pair connection between the motor pin joint and the right side top slider joint with a 50mm/revolution user defined property. The lift now operates as you would expect. I am attaching a video. I hope this answers your question.
Thanks,
Jordan

{kind=link}
{kind=link}