
Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
Please log in to access translation
Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
Community Tip - Want the oppurtunity to discuss enhancements to PTC products? Join a working group! X
- Community
- Creo+ and Creo Parametric
- 3D Part & Assembly Design
- Basic mechanism question
Translate the entire conversation x
Please log in to access translation
Options
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
Basic mechanism question
Nov 25, 2014
06:53 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Nov 25, 2014
06:53 PM
Basic mechanism question
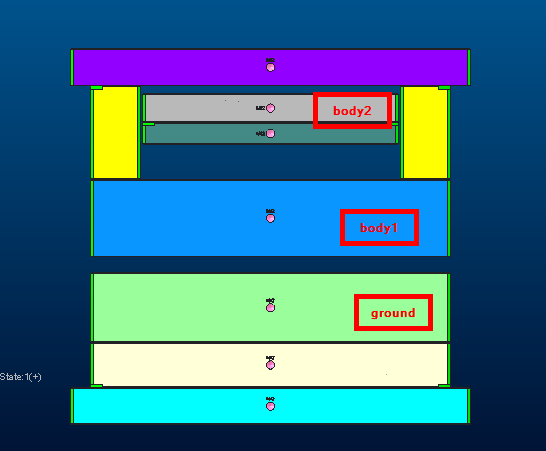
Ok, trying to learn something about mechanisms..
I have two bodies and a ground. here is a simplified image:
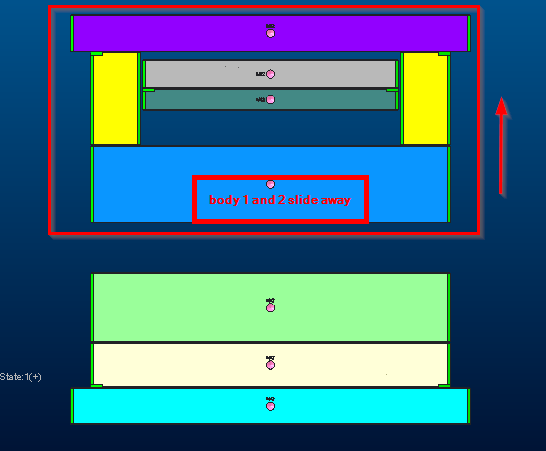
I need that body 1 and 2 slide away from ground:
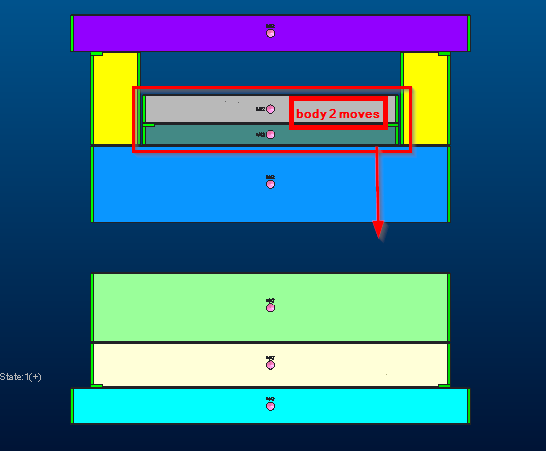
Then I need body 2 to come in reverse direction:
I have to work with subassemblies because I have a lot more components than it is represented in images.
Now what´s the best way to deal with this?
1. Create a assembly for body1 and inside, another subassembly for body2?
2. Create independent assemblies for each? But when I create a motor, I can only choose one connection, and I need them to move simultaneously in first step...
Any help will be apreciated..
Jose
This thread is inactive and closed by the PTC Community Management Team. If you would like to provide a reply and re-open this thread, please notify the moderator and reference the thread. You may also use "Start a topic" button to ask a new question. Please be sure to include what version of the PTC product you are using so another community member knowledgeable about your version may be able to assist.
Labels:
- Labels:
-
Assembly Design
9 REPLIES 9
Dec 01, 2014
03:45 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Dec 01, 2014
03:45 PM
Jose,
Both options should work. I would set up the assemblies the same way they are being built. I would use some sub assemblies.
Question, What's driving the sub systems locations (springs, Motors, etc)?
When you look at the pictures you would have to have a spring, linear motor system or something to drive the postions of the components as gravity would not allow the system to work as shown.
Need more definition as to what's making the parts move?
You can drive multiple motors in a mechanism analysis at the same time, just extend each motor definition time line to overlap each other (might look at a table driven motor instead of a graph driven or equation driven)
Hope this Helps,
Don Anderson
Dec 01, 2014
05:53 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Dec 01, 2014
05:53 PM
Hi,
I don´t have the MDO extension, I´m using the free version. So I don´t have springs neither gravity.
I just just want to create a simple kinematic analysis, a kind of a animation, without forces calculations.
For moving the parts I´m using a servo motor. I´ll take a look at the table driven motor as you suggest.
I have tried both ways I mentioned, and none seems to work properly. I have to spend some more time on this.
Thanks for your help.
Jose
Dec 01, 2014
08:12 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Dec 01, 2014
08:12 PM
Do we, as non-MDO owners, have collision detection?
That would make it easier.
Maybe the limits in your constraint can be your stop if collision is not an option.
Cam motion gives you a bit of added capabilities too.
User defined and table defined servo motor profiles are pretty simple.
Since you are just visualizing this, the table driven it real easy to set up in a linear fashion.
The User defined one is more geared to formulas. Have a look at this one for a quick reference:
Radial Ball Bearing: Checking your mechanism links
With the abrupt cutoff of the one part, you do need something to interrupt a nice cosine sweep. This can be done by getting data back from your assembly and using that in the User definition.
Pick your poison on how you want to accomplish this and I'd be happy to help.
Dec 02, 2014
04:06 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Dec 02, 2014
04:06 PM
I played with this using cams. Creo really should be more forgiving in this effort but it is not. It took me a couple of attempts to get it to pay attention to my intent.
Attached you will find a full version Creo 2.0 assembly and an animation gif. Also included is the mechanism analysis file ready to run.
Dec 02, 2014
05:21 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Dec 02, 2014
05:21 PM
Hi Antonius,
We have collision detection but doesn´t seem to work when we run a analyses. It only works when we drag the components manually.
It´s under Model properties -> Collision detection
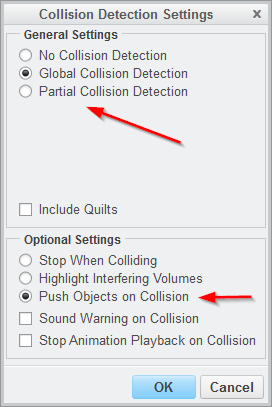
Or under Playbacks -> collision detection settings

I have had already success to make that motion to work, without knowing for sure what I have done differently this time...
Thanks for all the info provided, I will analyze it a little bit now.
Jose
Dec 02, 2014
05:38 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Dec 02, 2014
05:38 PM
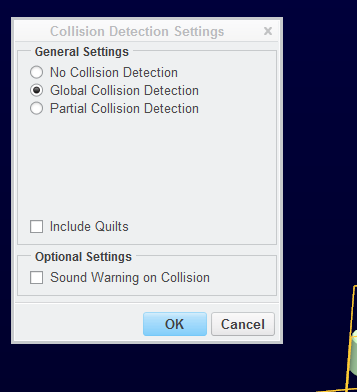
You seem to have a few more options in your collision detection dialog... (Creo 2.0 M040)
Interesting: enable_advanced_collision *no/yes !!!
more fun with mechanism...
These are the motion profiles related to time...
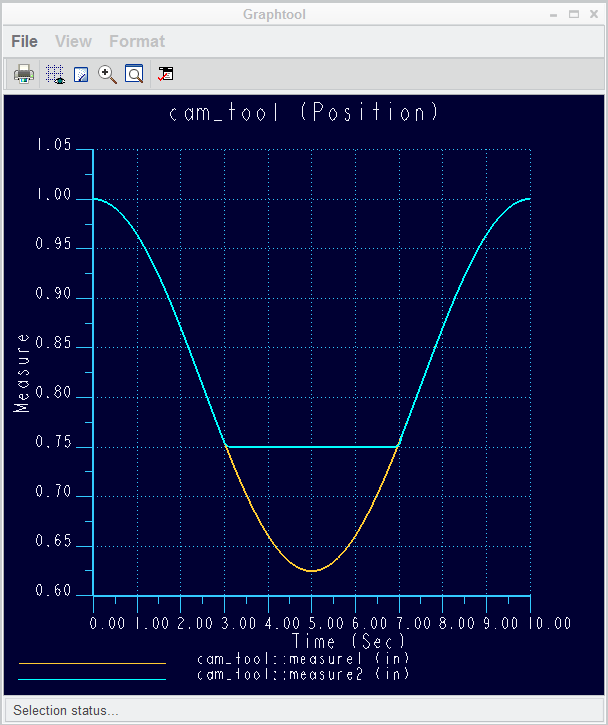
From the graphs, you can save the data. With the data, you can create servo motor table profiles.
Dec 08, 2014
11:40 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Dec 08, 2014
11:40 AM
Jose,
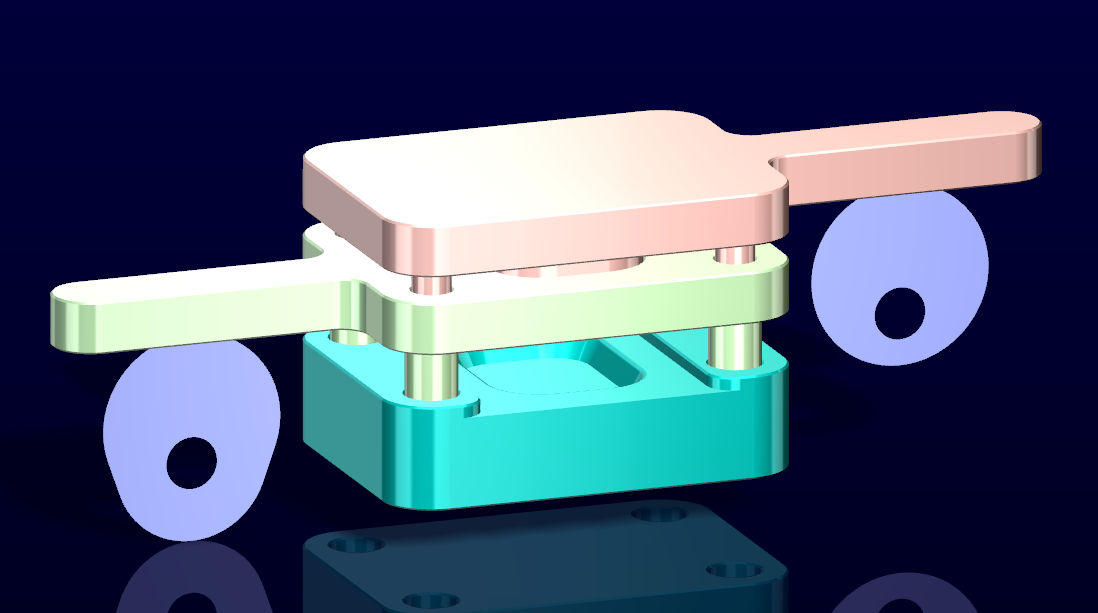
If you only want an animation you could try this:
I assembled the blue part to the orange one, and the green part to the blue one with planer constraints. Then, in the Snapshot dialog box I did a mate offset of the lower ouside surface of the blue part to the upper surface of the orange part.. I also did a mate offset of the upper surface of the green part to the inside upper surface of the blue part. I took a snapshot of this configuration, then modified the offset distance of the blue part to the orange part and took a second snapshot. Finally, I changed the offset distance of the green part and took a third snapshot. Using the three snapshots, I created an animation.
Dec 08, 2014
12:53 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Dec 08, 2014
12:53 PM
Thanks for your contribution, but it doesn´t suit my needs. I know that I may create the animation with snapshots or exploded views. That´s how I have been doing it so far.
But I need to add some angled movements, like lifters, look at this example:
Dec 08, 2014
03:38 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Dec 08, 2014
03:38 PM
Sometimes it is easier to simply stitch together several animation.
It is also fairly easy to timeline different servo motor actions. If each action is unique along the timeline, then this is the easiest to accomplish with individual servo motors and no specific links. The user defined profile will let you set the action along the timeline. it gets a little more tricky is you need soft starts and stops as you will want to program in sine curve equations or add additional steps to mimic the soft start/stop.




