
Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
Please log in to access translation
Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
Community Tip - Did you know you can set a signature that will be added to all your posts? Set it here! X
Translate the entire conversation x
Please log in to access translation
Options
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
Hello, World! See my 1-st Prime Animation!
Apr 22, 2017
08:01 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Labels:
- Labels:
-
Other
106 REPLIES 106
Apr 25, 2017
02:21 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 25, 2017
02:21 AM
curious thing....
I can open without any problems.
Did you got an error message? If yes, which one?
Volker
Apr 25, 2017
02:41 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 25, 2017
02:41 AM
Do you use Prime 3.1 or 4?
Apr 25, 2017
05:28 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 25, 2017
05:28 AM
Aha!
I'm using Prime 4.
Volker
Apr 25, 2017
05:30 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 25, 2017
05:30 AM
And I cannot convert to MP3.
Pretty poor...
Volker
Apr 25, 2017
05:44 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 25, 2017
05:44 AM
Create please pdf.
I will try to convert my Prime Express 4 into full Prime 4.
Apr 25, 2017
07:38 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 25, 2017
07:38 AM
Valery,
here are the pdf's
As to Lagrangesche: after trying to calculate it, it seems for me to be much to complex.
Applying the Newton's Laws is much easier.
Volker
...und mühsam ernährt sich das Eichhörnchen...
Volker
Apr 25, 2017
08:57 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 25, 2017
08:57 AM
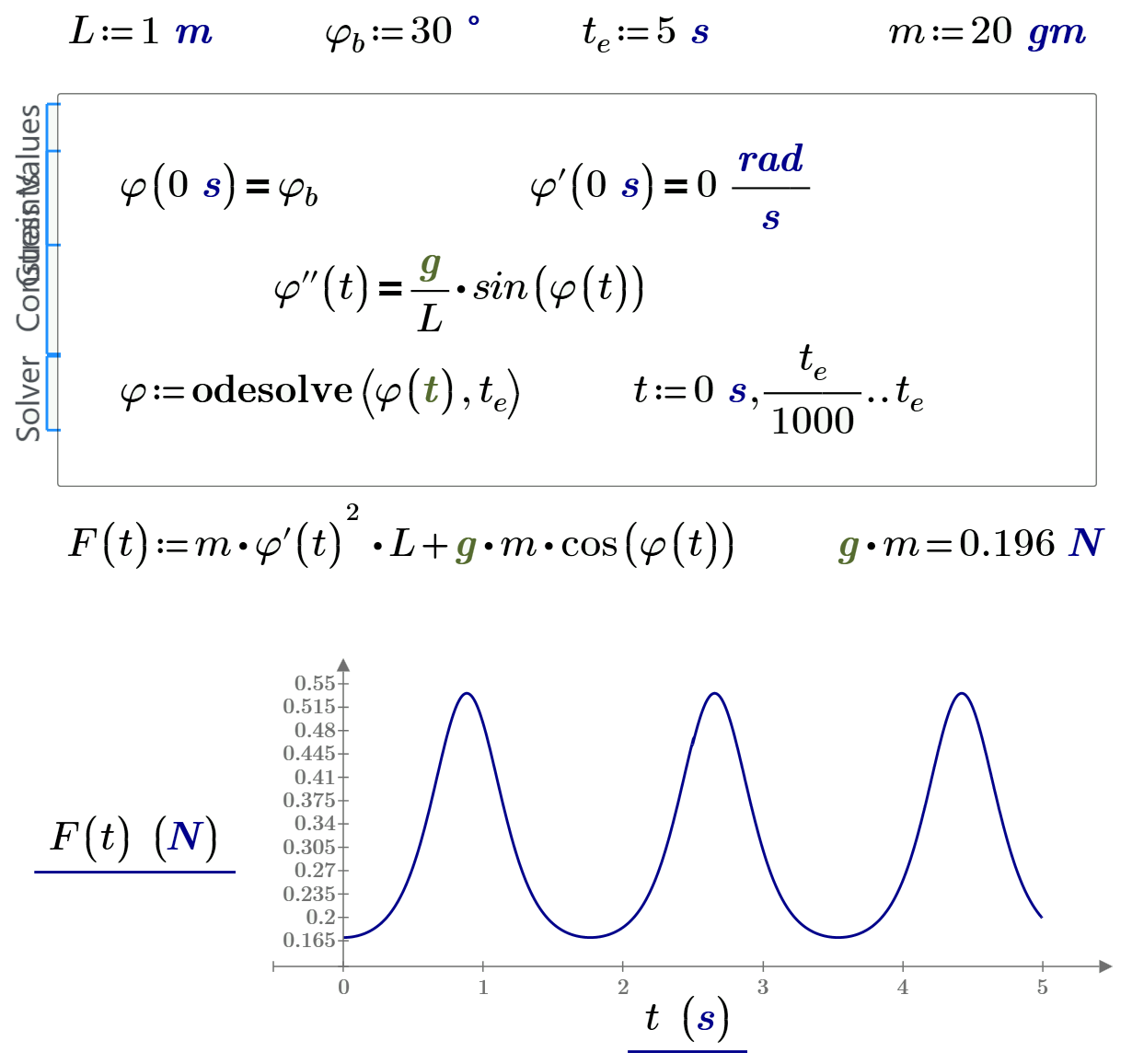
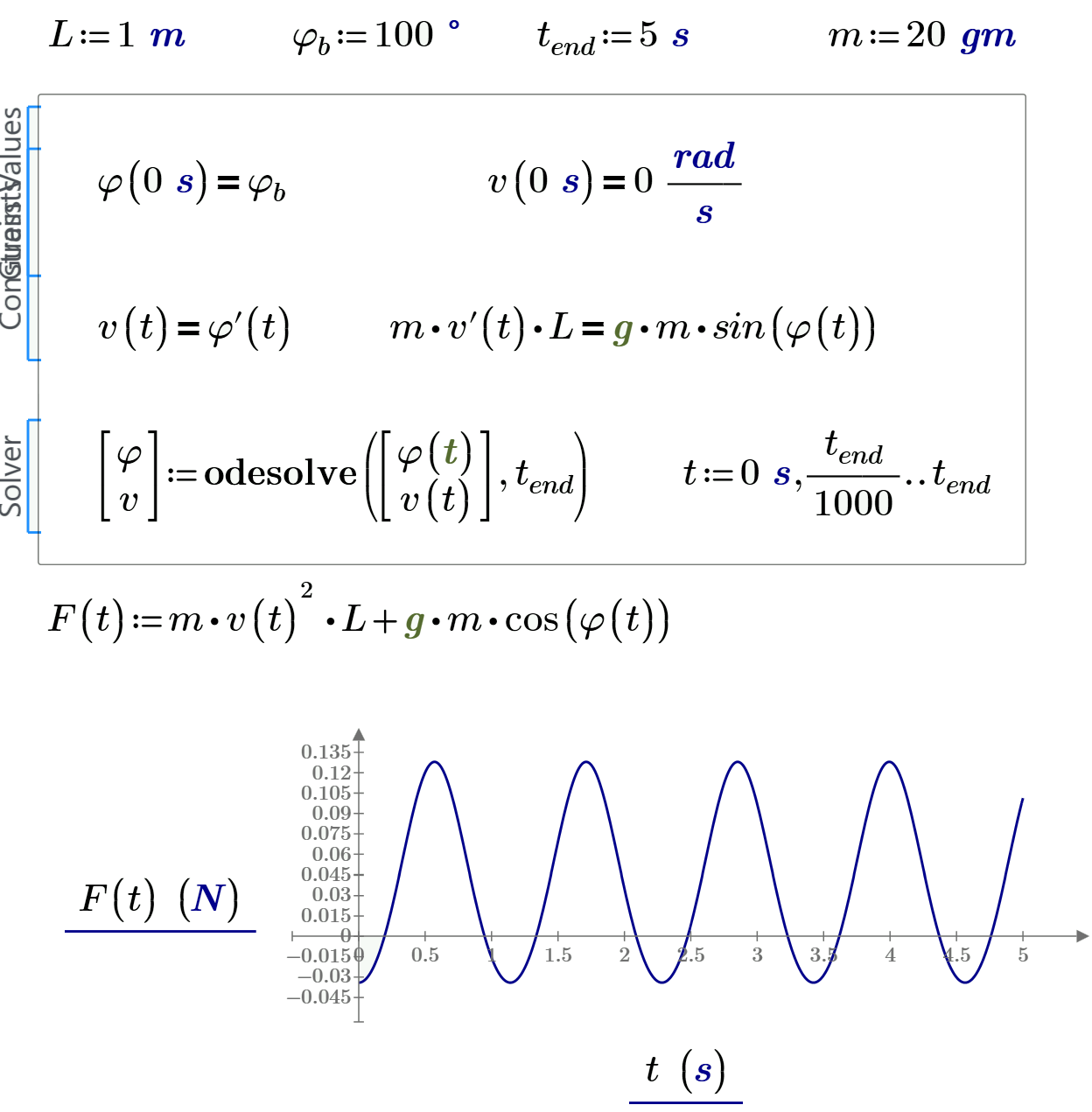
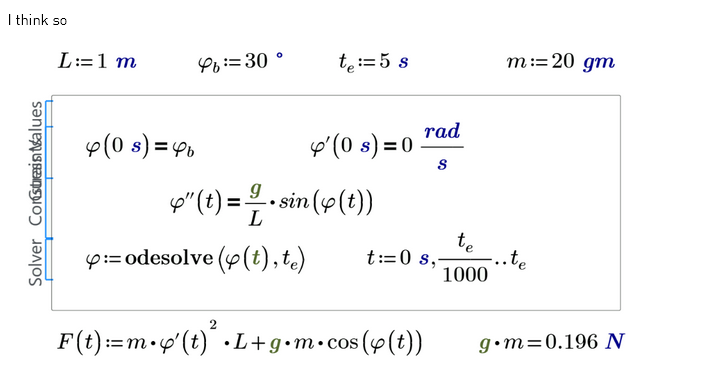
Try it for single pendulum in attach and compare Newton and Lagrange!
Apr 25, 2017
11:28 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 25, 2017
11:28 AM
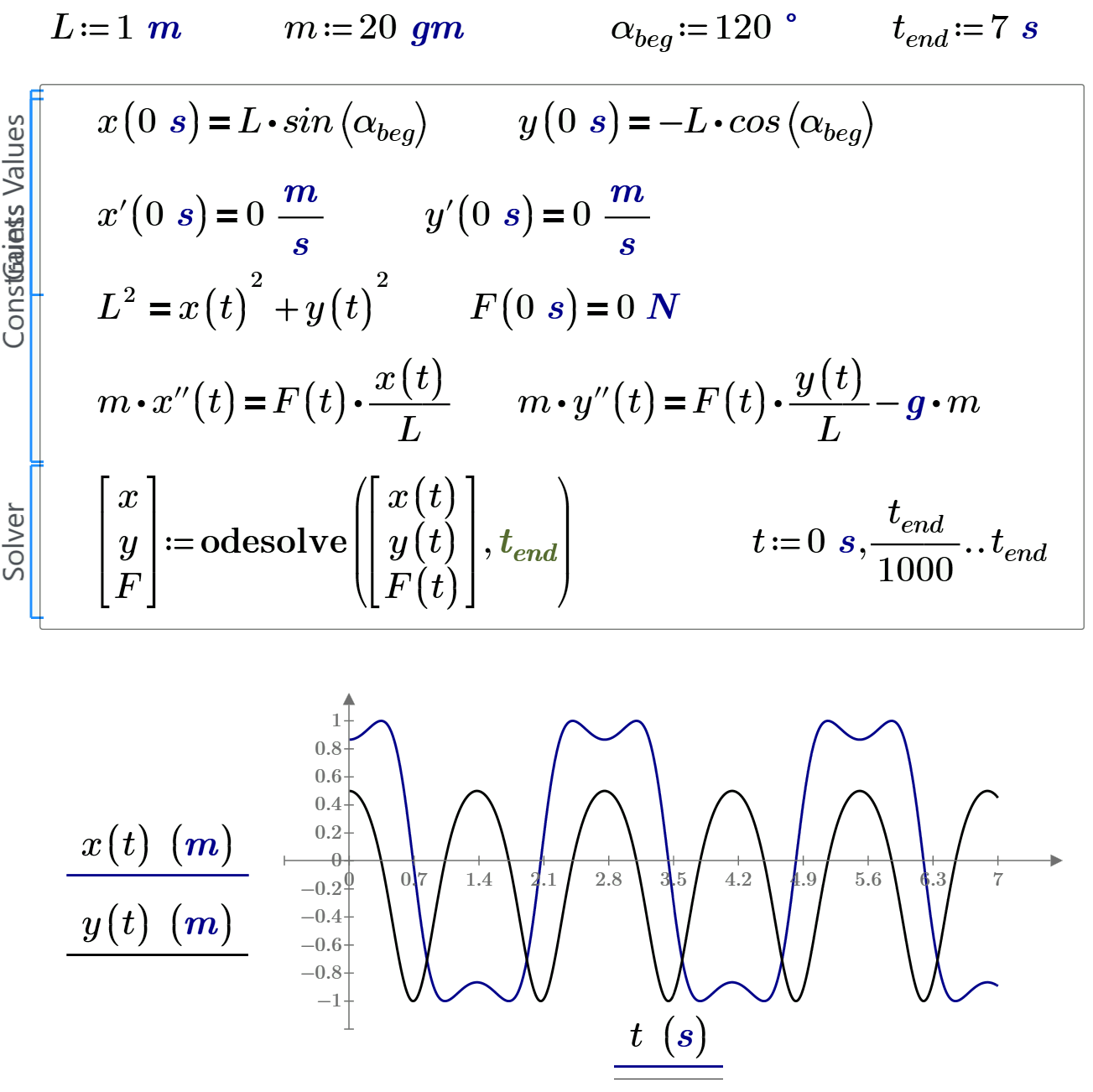
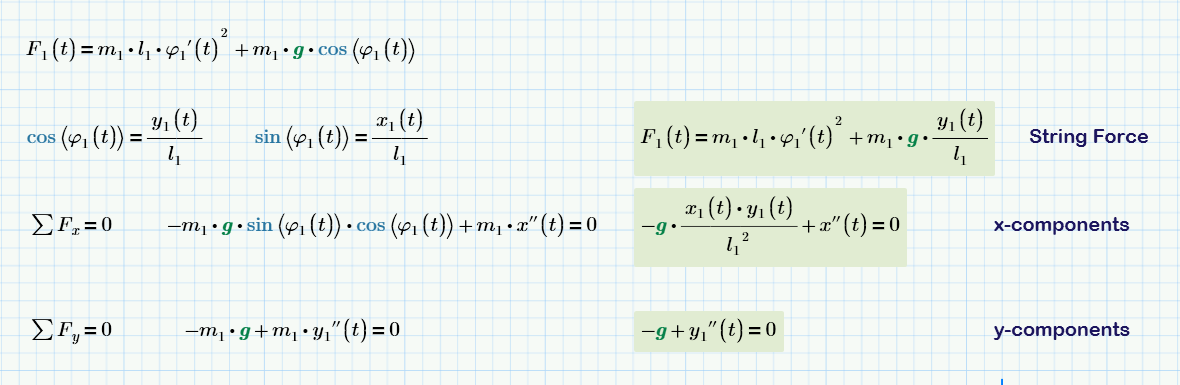
with Lagrangesche: x and y plots are like yours with the Newton.
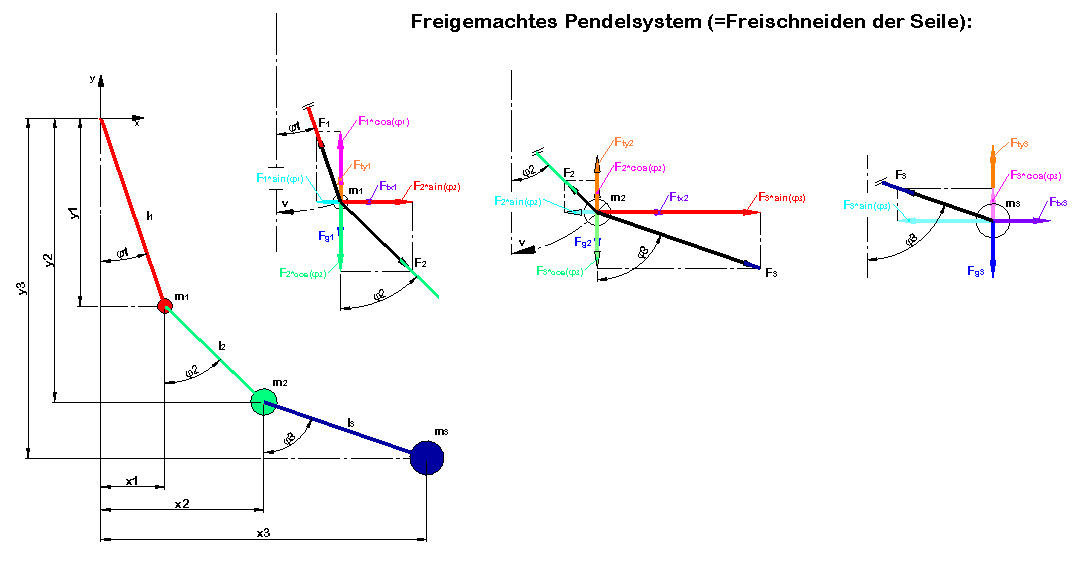
But my Force-diagramm looks very strange because of the second derivation of simulated x and y.
Please check your Force-Summation: The Inertial forces must point against the moving direction (=Scheinkräfte,Trägheit)! (see handskript sketch, Law of statics)
Edit 01: Files refreshed
Volker
Apr 25, 2017
02:10 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 25, 2017
03:57 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 25, 2017
03:57 PM
Valery, you're right and I think so too...
The complete Force F1 in the string consists of:
- Zentripetal Force Fz1
- The cosinus-component of the gravitational force, which is in direction of the string.
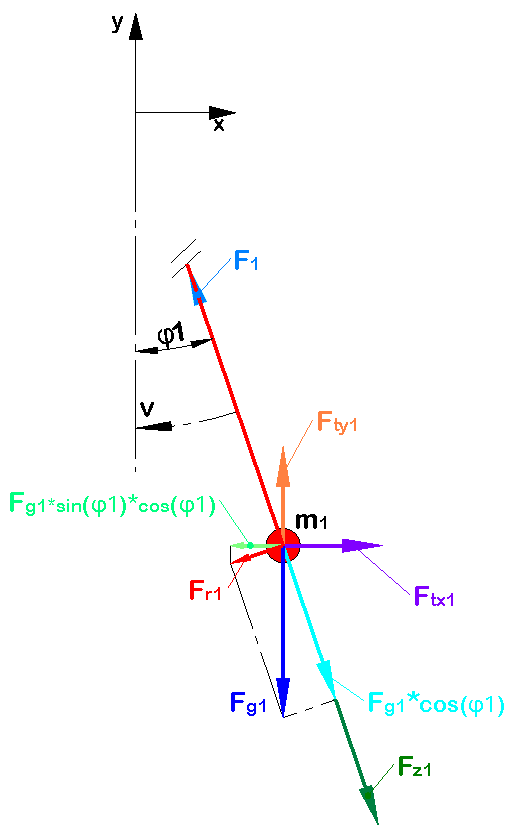
If so, we have to revise all Force components completely in all pendulum modellings!
Heureka?!
Volker
Apr 25, 2017
08:50 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 25, 2017
08:50 PM
Ok, but it is not Lagrange - it is old good Newton
Lagrange is so Lagrangian mechanics - Wikipedia
Can we find trajectories use not Newton's but Lagrange method?
Is here one reason to use here Newton's but Lagrange method?
Apr 25, 2017
11:55 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 26, 2017
04:04 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 26, 2017
04:04 AM
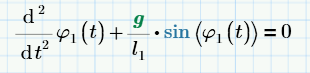
Valery,
Your equation is wrong.
It has to be for a single pendulum (derived from the Lagrangesche Formalism!):
https://de.wikipedia.org/wiki/Mathematisches_Pendel
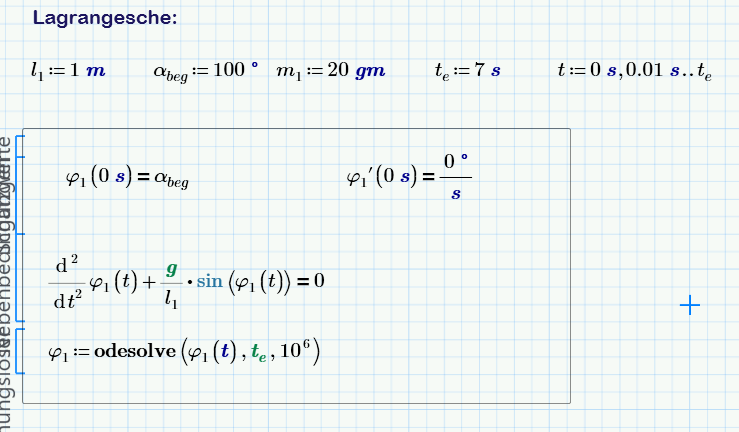
Volker
Apr 26, 2017
08:52 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 26, 2017
08:52 AM
Volker Lehner написал(а):
Valery,
Your equation is wrong.
Why! It is same as your one!
Apr 26, 2017
11:37 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 26, 2017
11:37 AM
No it isn't!
you calculated:
and
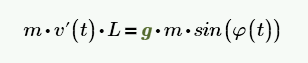
and both are wrong.
right is:
for a single Pendulum.
Volker
Apr 26, 2017
01:02 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 26, 2017
01:02 PM
Compression is a plus, and stretching is a minus.
So in Russia.
Compression is a minus, and stretching is a plus.
So in Germany
Apr 26, 2017
01:09 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 26, 2017
01:09 PM
Compression is a minus, and stretching is a plus.
So in Germany
also in Wikipedia and Wikipedia is worldwide.
https://de.wikipedia.org/wiki/Mathematisches_Pendel
Volker
Apr 26, 2017
01:22 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 26, 2017
01:22 PM
I will edit this page of Wiki 
Apr 26, 2017
12:35 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 26, 2017
12:35 AM
Let end the article so:
Важное замечание.
Решая задачу о тройном маятнике нужно вспомнить об инерциальных и неинерциальных системах отсчета, не только о ньютоновской, но и о лагранжевой и гамильтоновой механике, а также о других тонкостях раздела физики под названием динамика. В настоящее время, почти все физические журналы не принимают к рассмотрению не только статьи с описанием вечных двигателей, но и статьи по динамике с опорой только на ньютоновскую механику. Принцип Лагранжа состоит в том, что траектория материальной точки должна быть такая, чтобы минимизировалась разность между кинетической энергией и потенциальной энергией. Вот мы и закругляемся! Не только в том смысле, что заканчиваем статью, а и в том смысле, что мы возвращаемся к ее началу, где принцип минимизации был применен к задаче статики, а не динамики. Предлагаем читателям решить задачу о тройном маятнике, опираясь не на второй закон Ньютона (см. рис. 16), а на принцип Лагранжа. При этом нужно помнить о том, что этот принцип разрабатывался тогда, когда не было компьютеров с их численными методами решения задач. Нужно также не забывать и о том, что численные методы могут давать большую погрешность, которая может неузнаваемо искажать решение задачи.
Но данная статья не о механике и нюансах решения задач при разных подходах к ним, а о том, как старые не очень сложные задачи можно решать с помощью современных компьютерных средств.
Apr 26, 2017
04:50 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 26, 2017
04:50 AM
My former goal was to solve the triple pendulum with Lagrangesche.
The equations are simple to define with the difference of the energys Ek and Ep.
But the derivatives of the equations are still to be created.
The next step, to display these extensive equations in a solve block is a very hard way to do-Ok so far, but if i want to simplify these equations, MathCad cannot display the whole equation. Error message: "The symbolic result is too large to display..."
For years I have solved many many mechanical problems with Lagrangesche and every time it was successful.
So the Lagrangesche Formalism is a very good and reliable way to manage such problems.
To solve the double pendulum it was no problem to handle the equations.
To solve the problem of the triple pendulum, the solution variant with Newtonian mechanics was more successful than Lagrange like you showed in an impressive way, Valery.
In this case, I recommend to estimate the usefulness and the effort of different approaches in order to achieve a useful result.
As I said, Lagrange's formalism is quite justified, but it also has limitations in the application of computing.
Best Regards, Volker
...have Fun...and be sucessful.
Volker
Apr 26, 2017
09:00 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 26, 2017
09:00 AM
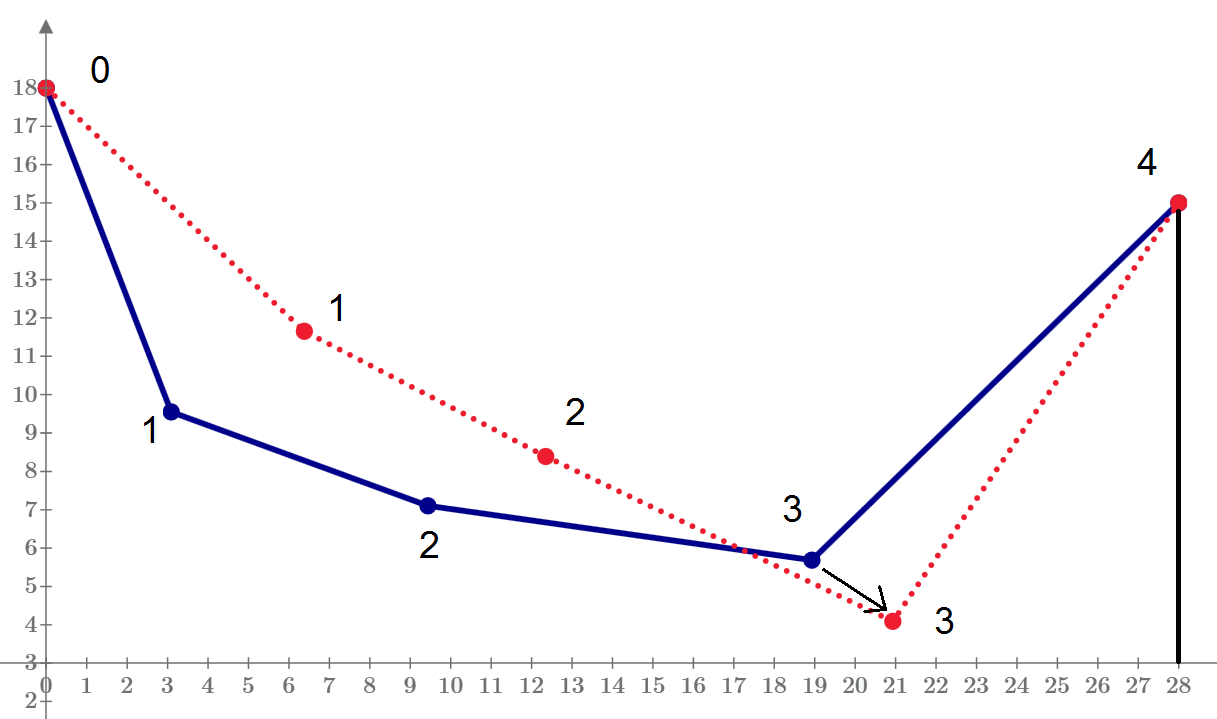
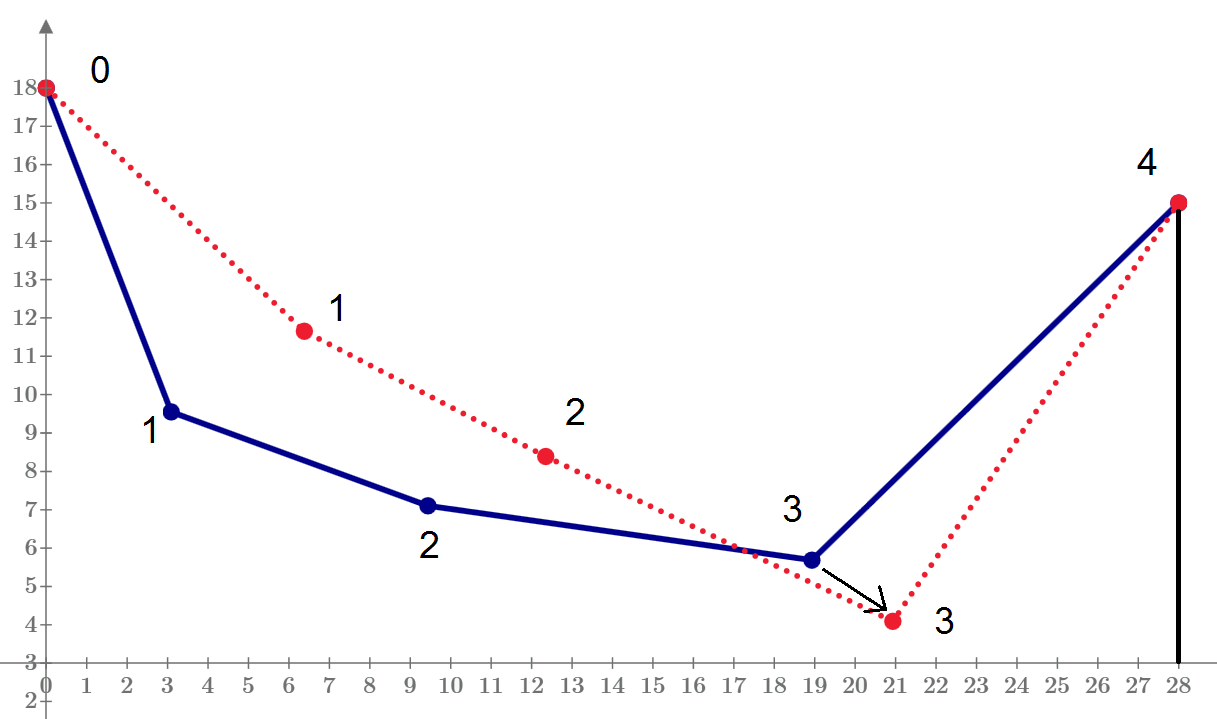
One good idea for new pendulum.
The string 0-1 is not break.
We move by hand the mass #3 to right-down (see the black arrow) and let free it!
How will move point 1, 2 and 3 in time.
It will be new interesting triple pendulum!
Apr 26, 2017
03:23 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 26, 2017
03:23 PM
ValeryOchkov написал(а):
One good idea for new pendulum.
The string 0-1 is not break.
We move by hand the mass #3 to right-down (see the black arrow) and let free it!
How will move point 1, 2 and 3 in time.
It will be new interesting triple pendulum!
Apr 26, 2017
03:43 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 26, 2017
03:46 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 26, 2017
03:46 PM
Animation?
Tomorrow!
Now I go to bet
Apr 27, 2017
05:49 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 27, 2017
06:23 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 27, 2017
06:23 AM
Nice Animation!
Volker
Apr 27, 2017
08:21 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 27, 2017
08:21 AM
Volker Lehner написал(а):
Nice Animation!
Ich bedanke mich herzlich!
And what about the model? Correct?
Plus in Germany and Russia but minus in Australia
Apr 27, 2017
03:13 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 27, 2017
03:13 PM
With Hooke's law - not hard links between points, but springs
Apr 28, 2017
12:59 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 28, 2017
12:59 AM
Apr 28, 2017
02:23 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Please log in to access translation
Apr 28, 2017
02:23 AM
At t>5s we have a static task and go from Odesolve to Find
See please Re: One task with 3 bobs - Forces searching





{kind=link}