

Question
Dynamic Analysis Definition Motor
Hi all.
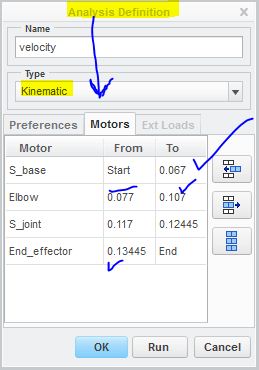
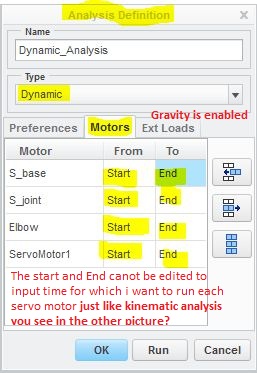
See these pictures and help me to find where might be the problem.I have written the question on the second figure in red.
Note: I have an MDO lisence installed.
This thread is inactive and closed by the PTC Community Management Team. If you would like to provide a reply and re-open this thread, please notify the moderator and reference the thread. You may also use "Start a topic" button to ask a new question. Please be sure to include what version of the PTC product you are using so another community member knowledgeable about your version may be able to assist.