

Constant of Integration? What am I missing?
I'm inputting some integrals that I had done by hand into Mathcad (Prime 2).
I noticed that the contants of integration are not added for symbollically integration equations, so I have been adding them. However, upon integration of one equation, I find Mathcad is inserting a constant term that falls out upon re-differentiation, and I cannot figure out where Mathcad is getting it from.
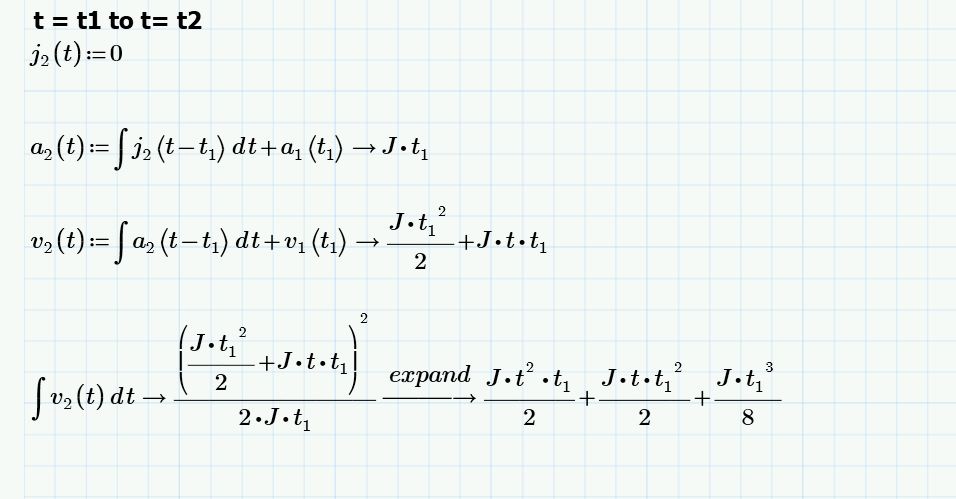
If you look at the definition for v2(t), v1(t1) is a constant term I entered manually. This term, which is supposed to represent a constant value at a point in time, correctly evaluates to 1/2 *J * t1^2 from a latter definition of v1. However, then I integrate and expand v2, I get this term which I do not get when I integrate by hand:
1/8 * J * t1^3.
When I differentiate this term falls out. Where is this coming from? Is it the constant of integration? I don't get this when I integrate by hand. Perhaps my integration is a bit rusty...I get the first 2 terms just fine.
I had initially thought that Mathcad was treating t1 like the integrated variable, but when I sbstitute the constant PI in for t1 I get the same results.
Any thoughts? I am new to Mathcad so any suggestions are appreciated. I have also included the worksheet.
For reference:
J, t1, and t2 are constant values which I was going to define later.
Thanks!