

Question
Creating Degrees of Freedom in Weighted Link
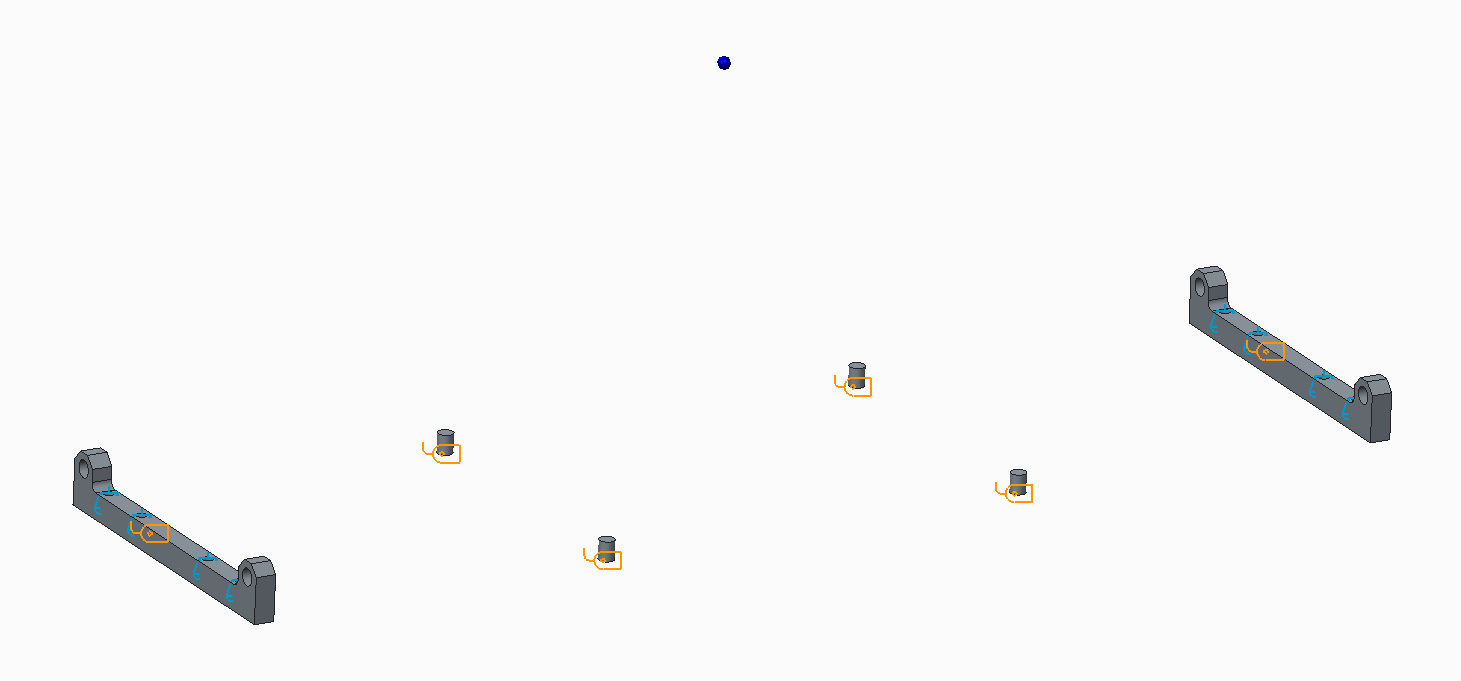
In this simulation I have a large box that is simplified to a point at its center of gravity (blue point in image above). The box is tied down to the floor using the 4 vertical locating pins and 4 horizontal pins going through the 2 pin block parts. I am trying to model the stresses in the pins and pin blocks, thus I need to transfer the inertial load of the point mass to these surfaces but only in the directions that make sense for the pin connections. How might I do this?
This thread is inactive and closed by the PTC Community Management Team. If you would like to provide a reply and re-open this thread, please notify the moderator and reference the thread. You may also use "Start a topic" button to ask a new question. Please be sure to include what version of the PTC product you are using so another community member knowledgeable about your version may be able to assist.