Solved
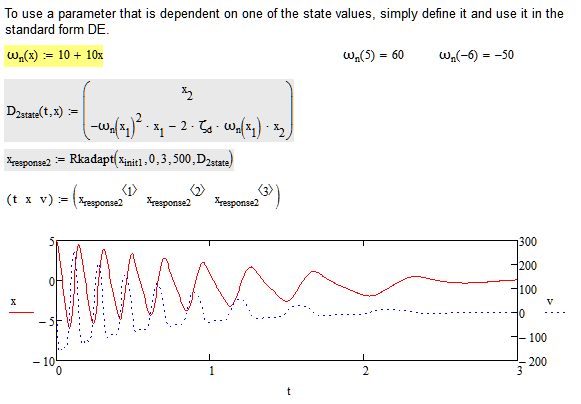
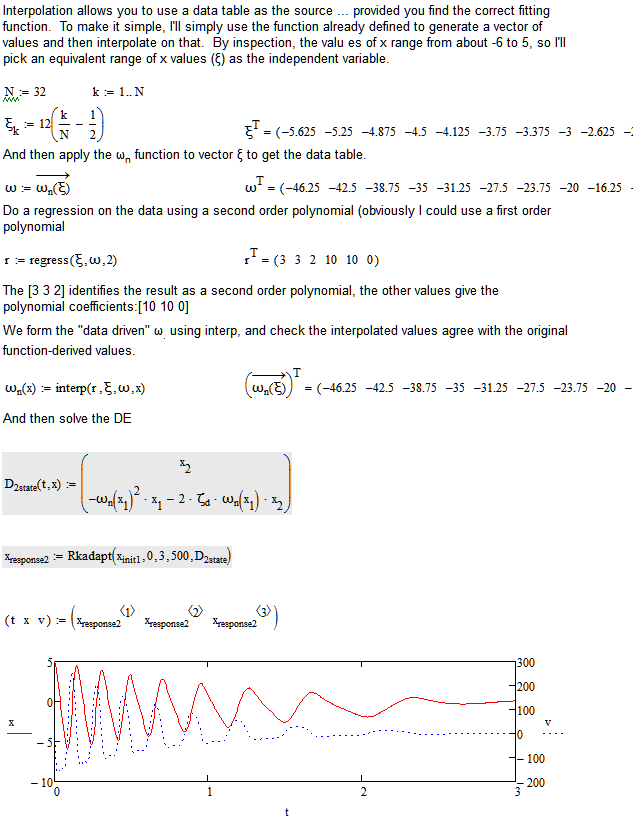
Input is a function of a state variable
I have a real life work problem I'm attempting to use MathCAD to solve. I'm computing the response time history of a coasting rotation inertia and at time zero reverse motor torque is applied. I have an 8th order state space model and I'm using Rkadapt to solve. The motor torque is a function of shaft speed and is thus a function of one of the state variables. I have the function as tabular data (lookup table). Any suggestions on how to formulate the motor torque?